 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDualCam: A Novel Benchmark Dataset for Fine-grained Real-time Traffic Light Detection
Paper and Code
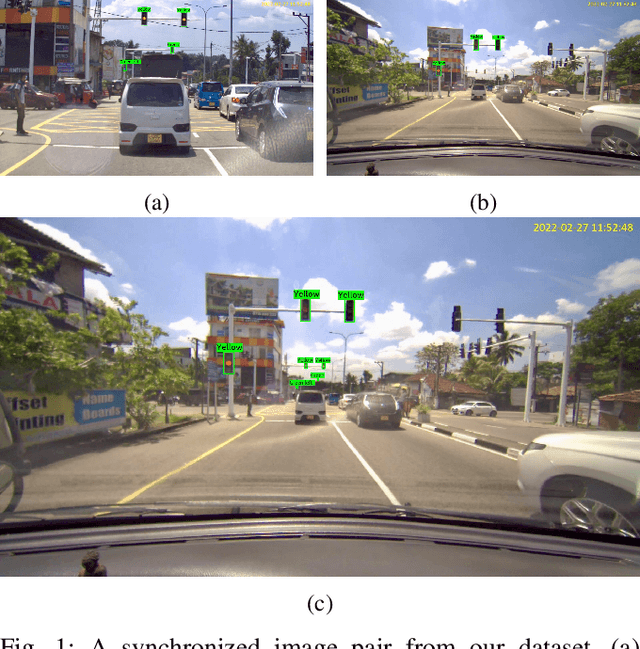

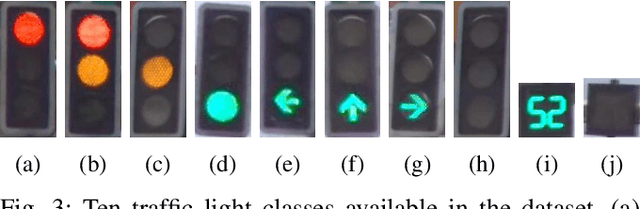

Traffic light detection is essential for self-driving cars to navigate safely in urban areas. Publicly available traffic light datasets are inadequate for the development of algorithms for detecting distant traffic lights that provide important navigation information. We introduce a novel benchmark traffic light dataset captured using a synchronized pair of narrow-angle and wide-angle cameras covering urban and semi-urban roads. We provide 1032 images for training and 813 synchronized image pairs for testing. Additionally, we provide synchronized video pairs for qualitative analysis. The dataset includes images of resolution 1920$\times$1080 covering 10 different classes. Furthermore, we propose a post-processing algorithm for combining outputs from the two cameras. Results show that our technique can strike a balance between speed and accuracy, compared to the conventional approach of using a single camera frame.