 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriveCoT: Integrating Chain-of-Thought Reasoning with End-to-End Driving
Paper and Code
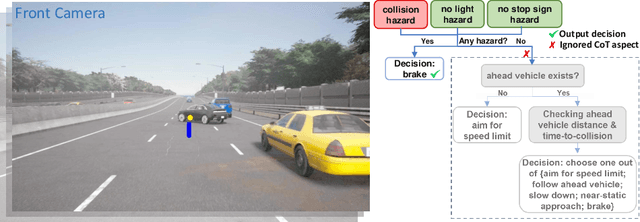
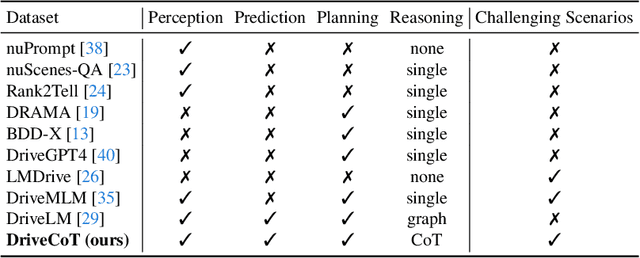
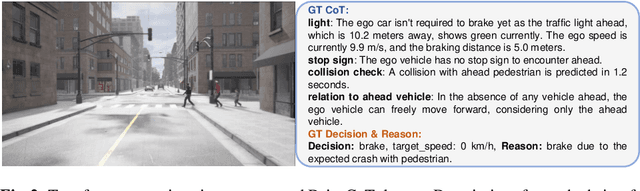
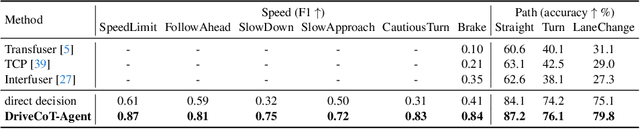
End-to-end driving has made significant progress in recent years, demonstrating benefits such as system simplicity and competitive driving performance under both open-loop and closed-loop settings. Nevertheless, the lack of interpretability and controllability in its driving decisions hinders real-world deployment for end-to-end driving systems. In this paper, we collect a comprehensive end-to-end driving dataset named DriveCoT, leveraging the CARLA simulator. It contains sensor data, control decisions, and chain-of-thought labels to indicate the reasoning process. We utilize the challenging driving scenarios from the CARLA leaderboard 2.0, which involve high-speed driving and lane-changing, and propose a rule-based expert policy to control the vehicle and generate ground truth labels for its reasoning process across different driving aspects and the final decisions. This dataset can serve as an open-loop end-to-end driving benchmark, enabling the evaluation of accuracy in various chain-of-thought aspects and the final decision. In addition, we propose a baseline model called DriveCoT-Agent, trained on our dataset, to generate chain-of-thought predictions and final decisions. The trained model exhibits strong performance in both open-loop and closed-loop evaluations, demonstrating the effectiveness of our proposed dataset.