 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDoubly Optimal Policy Evaluation for Reinforcement Learning
Paper and Code
Oct 03, 2024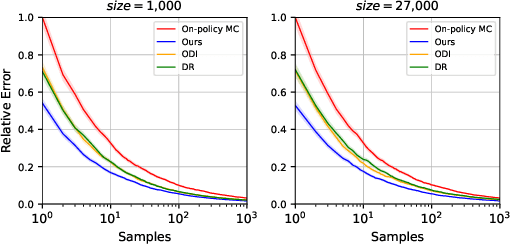
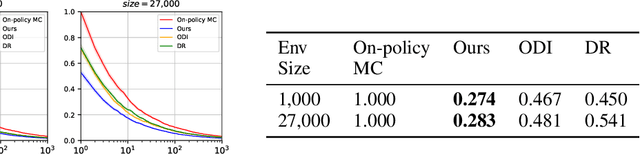
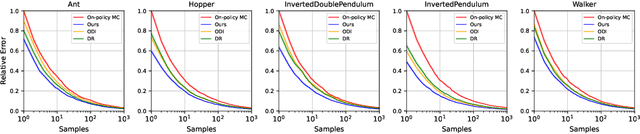
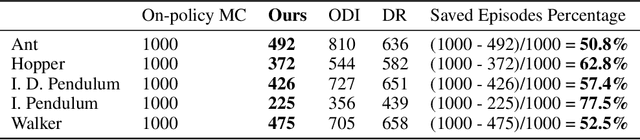
Policy evaluation estimates the performance of a policy by (1) collecting data from the environment and (2) processing raw data into a meaningful estimate. Due to the sequential nature of reinforcement learning, any improper data-collecting policy or data-processing method substantially deteriorates the variance of evaluation results over long time steps. Thus, policy evaluation often suffers from large variance and requires massive data to achieve the desired accuracy. In this work, we design an optimal combination of data-collecting policy and data-processing baseline. Theoretically, we prove our doubly optimal policy evaluation method is unbiased and guaranteed to have lower variance than previously best-performing methods. Empirically, compared with previous works, we show our method reduces variance substantially and achieves superior empirical performance.