 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDOGlove: Dexterous Manipulation with a Low-Cost Open-Source Haptic Force Feedback Glove
Paper and Code
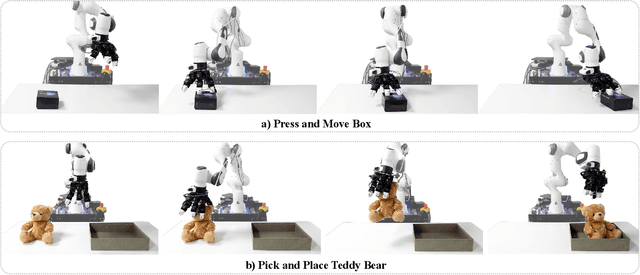
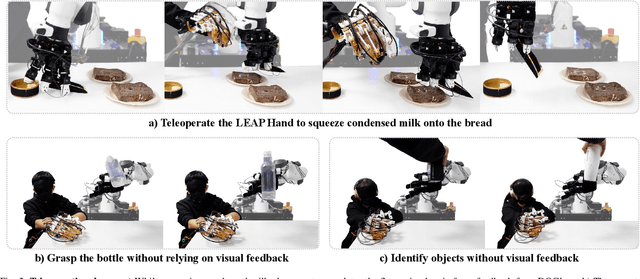
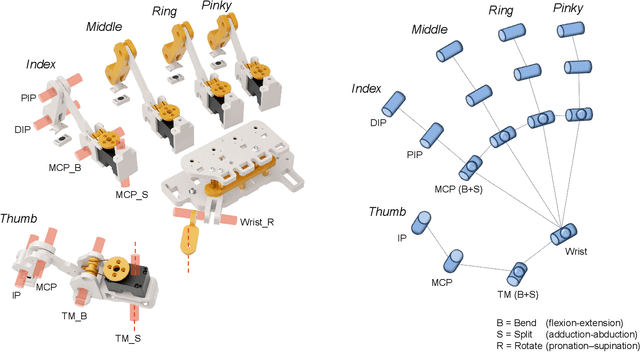
Dexterous hand teleoperation plays a pivotal role in enabling robots to achieve human-level manipulation dexterity. However, current teleoperation systems often rely on expensive equipment and lack multi-modal sensory feedback, restricting human operators' ability to perceive object properties and perform complex manipulation tasks. To address these limitations, we present DOGlove, a low-cost, precise, and haptic force feedback glove system for teleoperation and manipulation. DoGlove can be assembled in hours at a cost under 600 USD. It features a customized joint structure for 21-DoF motion capture, a compact cable-driven torque transmission mechanism for 5-DoF multidirectional force feedback, and a linear resonate actuator for 5-DoF fingertip haptic feedback. Leveraging action and haptic force retargeting, DOGlove enables precise and immersive teleoperation of dexterous robotic hands, achieving high success rates in complex, contact-rich tasks. We further evaluate DOGlove in scenarios without visual feedback, demonstrating the critical role of haptic force feedback in task performance. In addition, we utilize the collected demonstrations to train imitation learning policies, highlighting the potential and effectiveness of DOGlove. DOGlove's hardware and software system will be fully open-sourced at https://do-glove.github.io/.