 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisturbance Observer-based Control Barrier Functions with Residual Model Learning for Safe Reinforcement Learning
Paper and Code
Oct 09, 2024
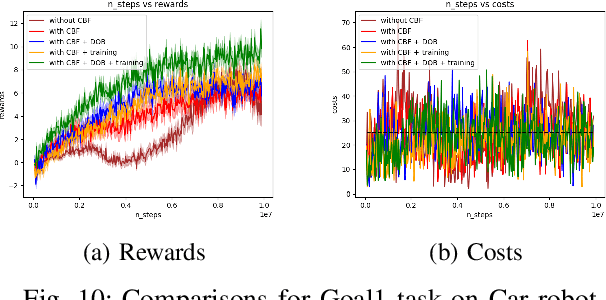
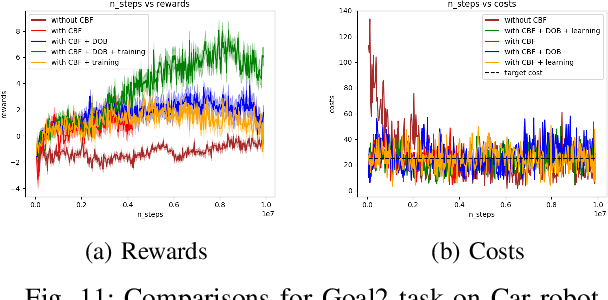

Reinforcement learning (RL) agents need to explore their environment to learn optimal behaviors and achieve maximum rewards. However, exploration can be risky when training RL directly on real systems, while simulation-based training introduces the tricky issue of the sim-to-real gap. Recent approaches have leveraged safety filters, such as control barrier functions (CBFs), to penalize unsafe actions during RL training. However, the strong safety guarantees of CBFs rely on a precise dynamic model. In practice, uncertainties always exist, including internal disturbances from the errors of dynamics and external disturbances such as wind. In this work, we propose a new safe RL framework based on disturbance rejection-guarded learning, which allows for an almost model-free RL with an assumed but not necessarily precise nominal dynamic model. We demonstrate our results on the Safety-gym benchmark for Point and Car robots on all tasks where we can outperform state-of-the-art approaches that use only residual model learning or a disturbance observer (DOB). We further validate the efficacy of our framework using a physical F1/10 racing car. Videos: https://sites.google.com/view/res-dob-cbf-rl