 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Resilient Submodular Action Selection in Adversarial Environments
Paper and Code
May 15, 2021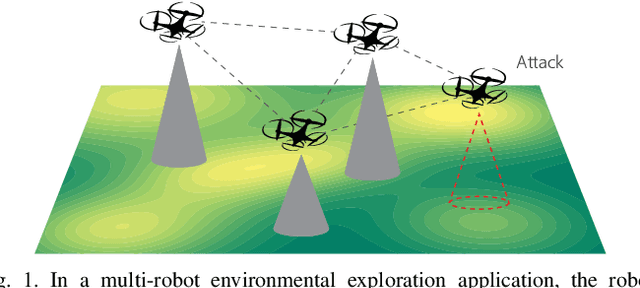
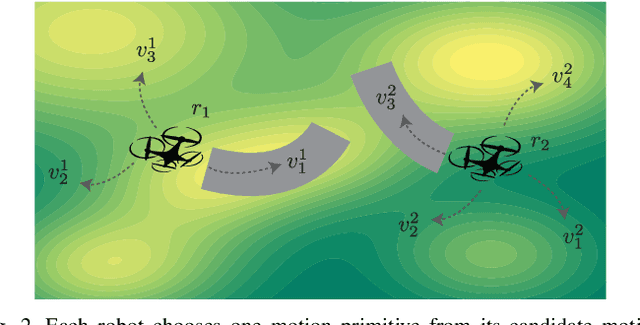
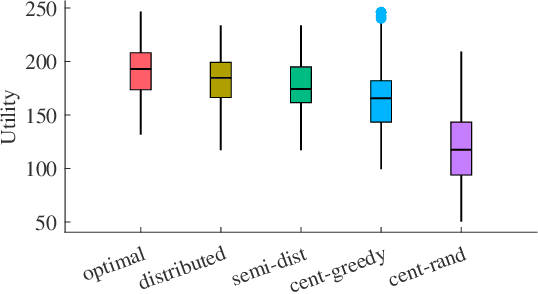
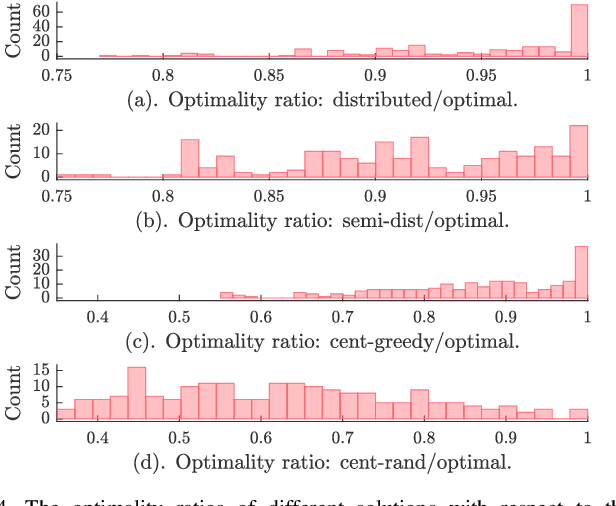
In this letter, we consider a distributed submodular maximization problem for multi-robot systems when attacked by adversaries. One of the major challenges for multi-robot systems is to increase resilience against failures or attacks. This is particularly important for distributed systems under attack as there is no central point of command that can detect, mitigate, and recover from attacks. Instead, a distributed multi-robot system must coordinate effectively to overcome adversarial attacks. In this work, our distributed submodular action selection problem models a broad set of scenarios where each robot in a multi-robot system has multiple action selections that may fulfill a global objective, such as exploration or target tracking. To increase resilience in this context, we propose a fully distributed algorithm to guide each robot's action selection when the system is attacked. The proposed algorithm guarantees performance in a worst-case scenario where up to a portion of the robots malfunction due to attacks. Importantly, the proposed algorithm is also consistent, as it is shown to converge to the same solution as a centralized method. Finally, a distributed resilient multi-robot exploration problem is presented to confirm the performance of the proposed algorithm.