 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Multirobot Control for Non-Cooperative Herding
Paper and Code
Jan 09, 2023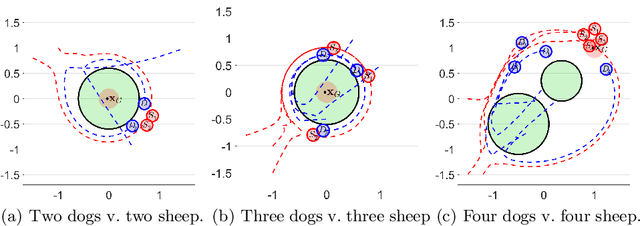
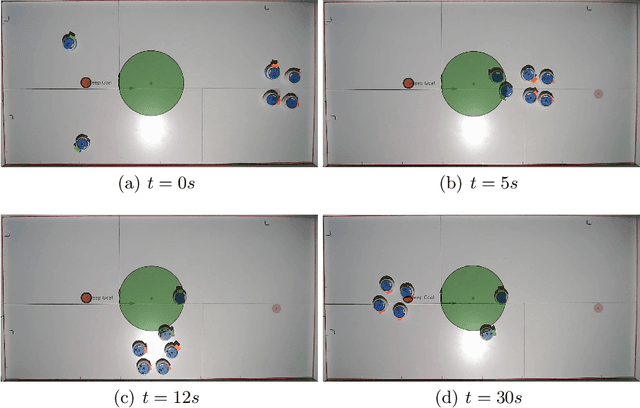
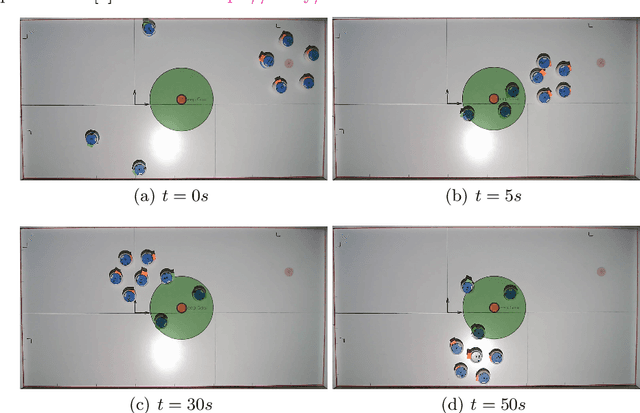
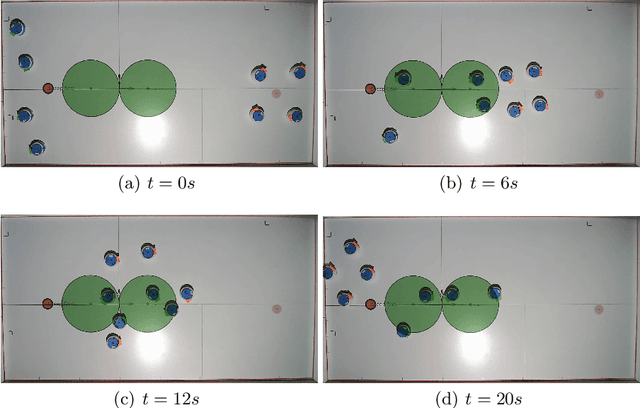
In this paper, we consider the problem of protecting a high-value area from being breached by sheep agents by crafting motions for dog robots. We use control barrier functions to pose constraints on the dogs' velocities that induce repulsions in the sheep relative to the high-value area. This paper extends the results developed in our prior work on the same topic in three ways. Firstly, we implement and validate our previously developed centralized herding algorithm on many robots. We show herding of up to five sheep agents using three dog robots. Secondly, as an extension to the centralized approach, we develop two distributed herding algorithms, one favoring feasibility while the other favoring optimality. In the first algorithm, we allocate a unique sheep to a unique dog, making that dog responsible for herding its allocated sheep away from the protected zone. We provide feasibility proof for this approach, along with numerical simulations. In the second algorithm, we develop an iterative distributed reformulation of the centralized algorithm, which inherits the optimality (i.e. budget efficiency) from the centralized approach. Lastly, we conduct real-world experiments of these distributed algorithms and demonstrate herding of up to five sheep agents using five dog robots.