 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisentangled Attention as Intrinsic Regularization for Bimanual Multi-Object Manipulation
Paper and Code
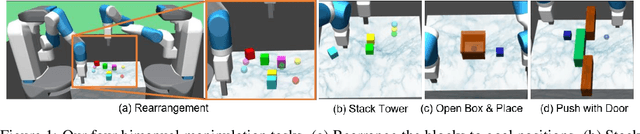

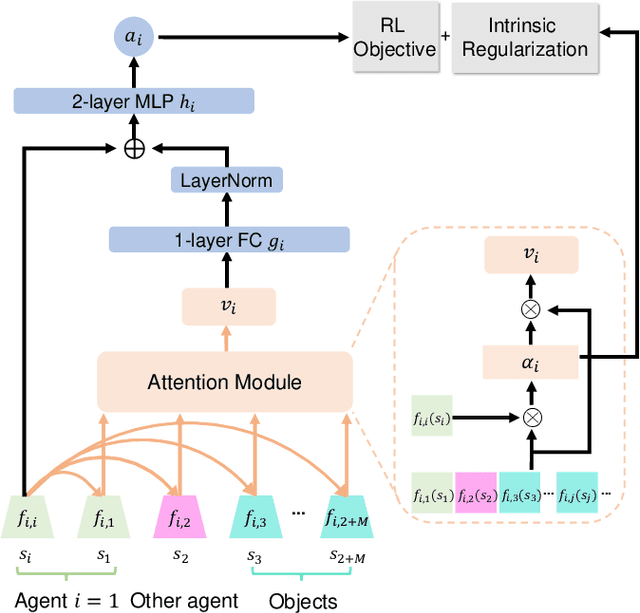
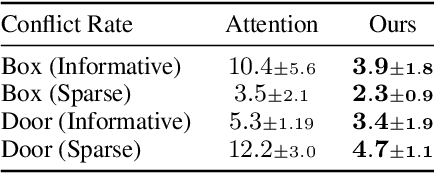
We address the problem of solving complex bimanual robot manipulation tasks on multiple objects with sparse rewards. Such complex tasks can be decomposed into sub-tasks that are accomplishable by different robots concurrently or sequentially for better efficiency. While previous reinforcement learning approaches primarily focus on modeling the compositionality of sub-tasks, two fundamental issues are largely ignored particularly when learning cooperative strategies for two robots: (i) domination, i.e., one robot may try to solve a task by itself and leaves the other idle; (ii) conflict, i.e., one robot can easily interrupt another's workspace when executing different sub-tasks simultaneously. To tackle these two issues, we propose a novel technique called disentangled attention, which provides an intrinsic regularization for two robots to focus on separate sub-tasks and objects. We evaluate our method on four bimanual manipulation tasks. Experimental results show that our proposed intrinsic regularization successfully avoids domination and reduces conflicts for the policies, which leads to significantly more effective cooperative strategies than all the baselines. Our project page with videos is at https://mehooz.github.io/bimanual-attention.