 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrete Latent Space World Models for Reinforcement Learning
Paper and Code
Oct 12, 2020
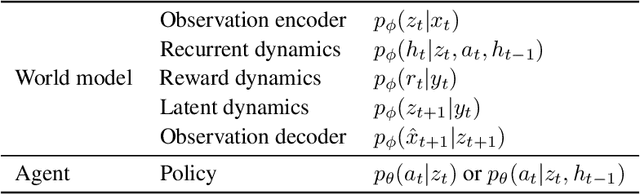
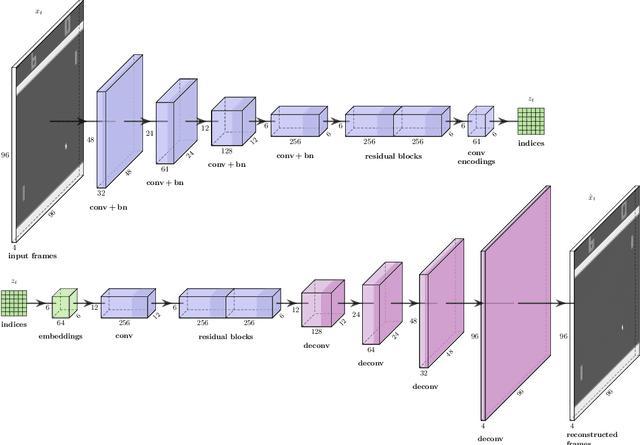

Sample efficiency remains a fundamental issue of reinforcement learning. Model-based algorithms try to make better use of data by simulating the environment with a model. We propose a new neural network architecture for world models based on a vector quantized-variational autoencoder (VQ-VAE) to encode observations and a convolutional LSTM to predict the next embedding indices. A model-free PPO agent is trained purely on simulated experience from the world model. We adopt the setup introduced by Kaiser et al. (2020), which only allows 100K interactions with the real environment, and show that we reach better performance than their SimPLe algorithm in five out of six randomly selected Atari environments, while our model is significantly smaller.