 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrete Action On-Policy Learning with Action-Value Critic
Paper and Code

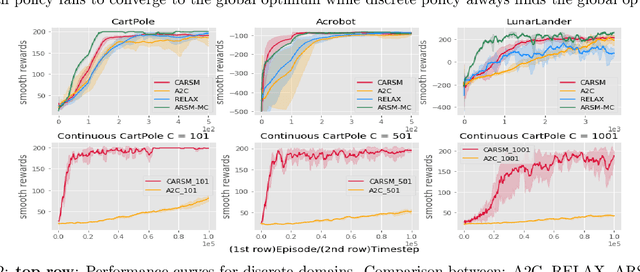


Reinforcement learning (RL) in discrete action space is ubiquitous in real-world applications, but its complexity grows exponentially with the action-space dimension, making it challenging to apply existing on-policy gradient based deep RL algorithms efficiently. To effectively operate in multidimensional discrete action spaces, we construct a critic to estimate action-value functions, apply it on correlated actions, and combine these critic estimated action values to control the variance of gradient estimation. We follow rigorous statistical analysis to design how to generate and combine these correlated actions, and how to sparsify the gradients by shutting down the contributions from certain dimensions. These efforts result in a new discrete action on-policy RL algorithm that empirically outperforms related on-policy algorithms relying on variance control techniques. We demonstrate these properties on OpenAI Gym benchmark tasks, and illustrate how discretizing the action space could benefit the exploration phase and hence facilitate convergence to a better local optimal solution thanks to the flexibility of discrete policy.