 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovery of Driving Patterns by Trajectory Segmentation
Paper and Code
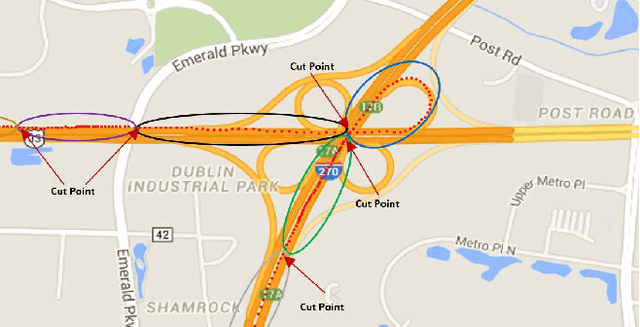
Telematics data is becoming increasingly available due to the ubiquity of devices that collect data during drives, for different purposes, such as usage based insurance (UBI), fleet management, navigation of connected vehicles, etc. Consequently, a variety of data-analytic applications have become feasible that extract valuable insights from the data. In this paper, we address the especially challenging problem of discovering behavior-based driving patterns from only externally observable phenomena (e.g. vehicle's speed). We present a trajectory segmentation approach capable of discovering driving patterns as separate segments, based on the behavior of drivers. This segmentation approach includes a novel transformation of trajectories along with a dynamic programming approach for segmentation. We apply the segmentation approach on a real-word, rich dataset of personal car trajectories provided by a major insurance company based in Columbus, Ohio. Analysis and preliminary results show the applicability of approach for finding significant driving patterns.