 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering Reliable Causal Rules
Paper and Code
Sep 08, 2020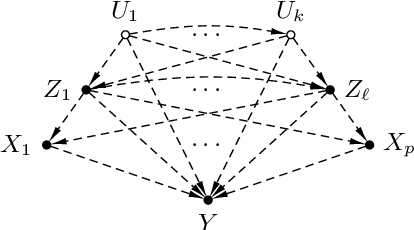
We study the problem of deriving policies, or rules, that when enacted on a complex system, cause a desired outcome. Absent the ability to perform controlled experiments, such rules have to be inferred from past observations of the system's behaviour. This is a challenging problem for two reasons: First, observational effects are often unrepresentative of the underlying causal effect because they are skewed by the presence of confounding factors. Second, naive empirical estimations of a rule's effect have a high variance, and, hence, their maximisation can lead to random results. To address these issues, first we measure the causal effect of a rule from observational data---adjusting for the effect of potential confounders. Importantly, we provide a graphical criteria under which causal rule discovery is possible. Moreover, to discover reliable causal rules from a sample, we propose a conservative and consistent estimator of the causal effect, and derive an efficient and exact algorithm that maximises the estimator. On synthetic data, the proposed estimator converges faster to the ground truth than the naive estimator and recovers relevant causal rules even at small sample sizes. Extensive experiments on a variety of real-world datasets show that the proposed algorithm is efficient and discovers meaningful rules.