 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering Governing Equations by Machine Learning implemented with Invariance
Paper and Code
Mar 29, 2022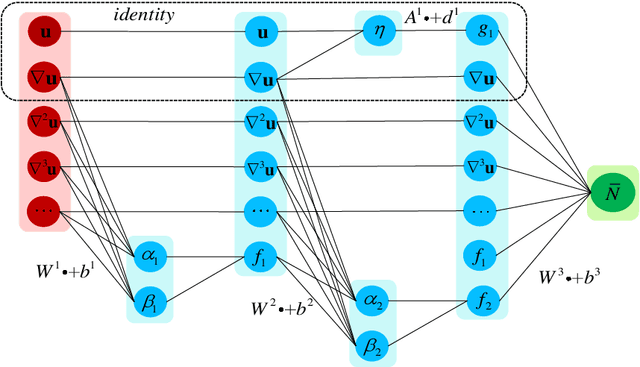
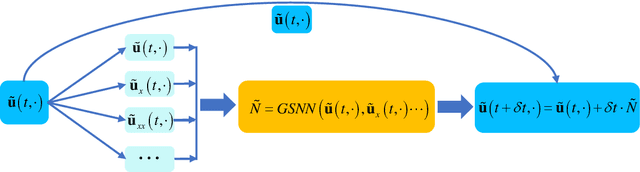
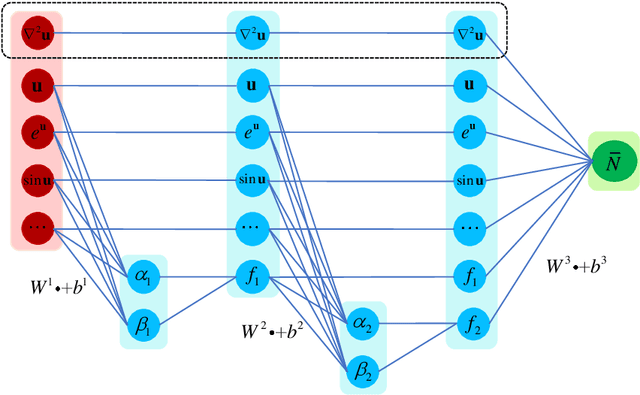
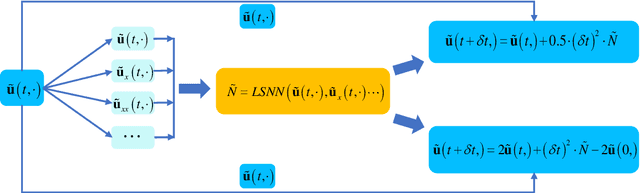
The partial differential equation (PDE) plays a significantly important role in many fields of science and engineering. The conventional case of the derivation of PDE mainly relies on first principles and empirical observation. However, the development of machine learning technology allows us to mine potential control equations from the massive amounts of stored data in a fresh way. Although there has been considerable progress in the data-driven discovery of PDE, the extant literature mostly focuses on the improvements of discovery methods, without substantial breakthroughs in the discovery process itself, including the principles for the construction of candidates and how to incorporate physical priors. In this paper, through rigorous derivation of formulas, novel physically enhanced machining learning discovery methods for control equations: GSNN (Galileo Symbolic Neural Network) and LSNN (Lorentz Symbolic Neural Network) are firstly proposed based on Galileo invariance and Lorentz invariance respectively, setting forth guidelines for building the candidates of discovering equations. The adoption of mandatory embedding of physical constraints is fundamentally different from PINN in the form of the loss function, thus ensuring that the designed Neural Network strictly obeys the physical prior of invariance and enhancing the interpretability of the network. By comparing the results with PDE-NET in numerical experiments of Burgers equation and Sine-Gordon equation, it shows that the method presented in this study has better accuracy, parsimony, and interpretability.