 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect Visual-Inertial Odometry with Semi-Dense Mapping
Paper and Code
Oct 04, 2019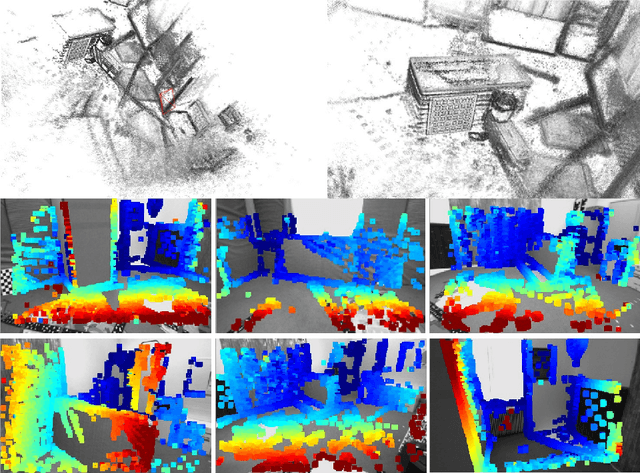



The paper presents a direct visual-inertial odometry system. In particular, a tightly coupled nonlinear optimization based method is proposed by integrating the recent advances in direct dense tracking and Inertial Measurement Unit (IMU) pre-integration, and a factor graph optimization is adapted to estimate the pose of the camera and rebuild a semi-dense map. Two sliding windows are maintained in the proposed approach. The first one, based on Direct Sparse Odometry (DSO), is to estimate the depths of candidate points for mapping and dense visual tracking. In the second one, measurements from the IMU pre-integration and dense visual tracking are fused probabilistically using a tightly-coupled, optimization-based sensor fusion framework. As a result, the IMU pre-integration provides additional constraints to suppress the scale drift induced by the visual odometry. Evaluations on real-world benchmark datasets show that the proposed method achieves competitive results in indoor scenes.