 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twin-Based 3D Map Management for Edge-Assisted Mobile Augmented Reality
Paper and Code
May 26, 2023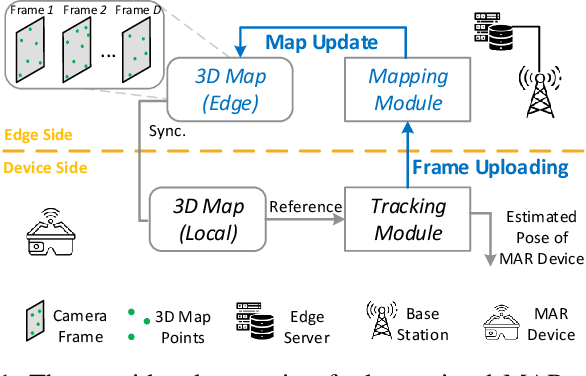
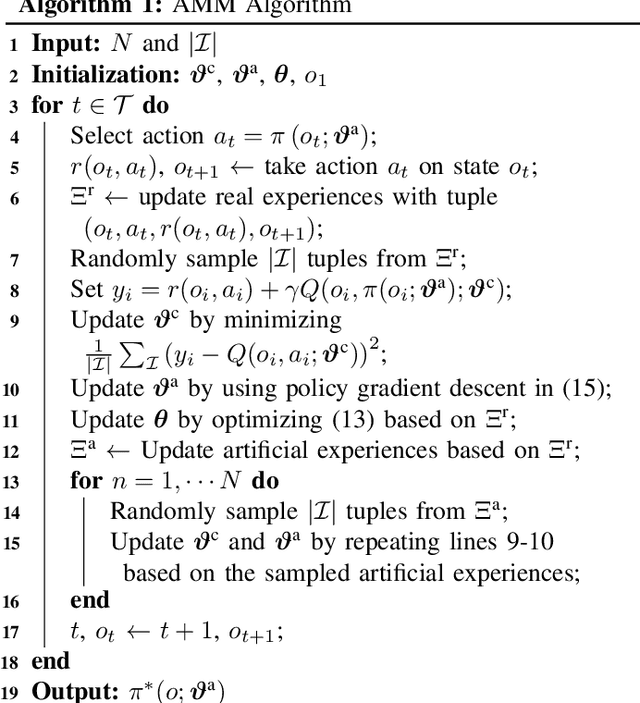
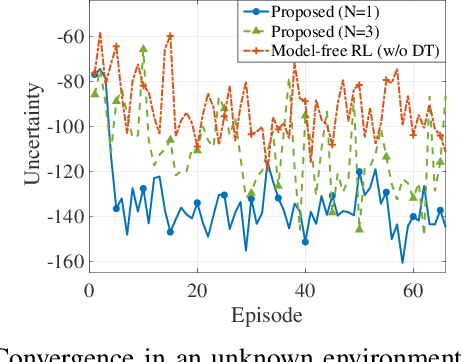
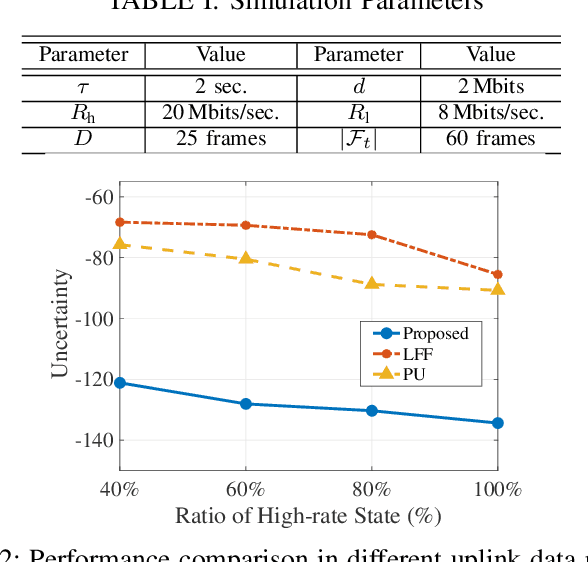
In this paper, we design a 3D map management scheme for edge-assisted mobile augmented reality (MAR) to support the pose estimation of individual MAR device, which uploads camera frames to an edge server. Our objective is to minimize the pose estimation uncertainty of the MAR device by periodically selecting a proper set of camera frames for uploading to update the 3D map. To address the challenges of the dynamic uplink data rate and the time-varying pose of the MAR device, we propose a digital twin (DT)-based approach to 3D map management. First, a DT is created for the MAR device, which emulates 3D map management based on predicting subsequent camera frames. Second, a model-based reinforcement learning (MBRL) algorithm is developed, utilizing the data collected from both the actual and the emulated data to manage the 3D map. With extensive emulated data provided by the DT, the MBRL algorithm can quickly provide an adaptive map management policy in a highly dynamic environment. Simulation results demonstrate that the proposed DT-based 3D map management outperforms benchmark schemes by achieving lower pose estimation uncertainty and higher data efficiency in dynamic environments.