 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigger Finger: GelSight Tactile Sensor for Object Identification Inside Granular Media
Paper and Code
Feb 20, 2021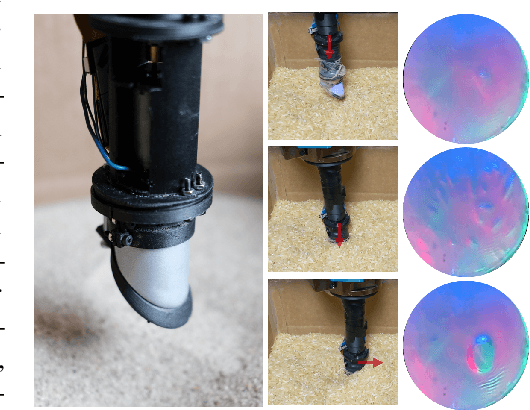
In this paper we present an early prototype of the Digger Finger that is designed to easily penetrate granular media and is equipped with the GelSight sensor. Identifying objects buried in granular media using tactile sensors is a challenging task. First, particle jamming in granular media prevents downward movement. Second, the granular media particles tend to get stuck between the sensing surface and the object of interest, distorting the actual shape of the object. To tackle these challenges we present a Digger Finger prototype. It is capable of fluidizing granular media during penetration using mechanical vibrations. It is equipped with high resolution vision based tactile sensing to identify objects buried inside granular media. We describe the experimental procedures we use to evaluate these fluidizing and buried shape recognition capabilities. A robot with such fingers can perform explosive ordnance disposal and Improvised Explosive Device (IED) detection tasks at a much a finer resolution compared to techniques like Ground Penetration Radars (GPRs). Sensors like the Digger Finger will allow robotic manipulation research to move beyond only manipulating rigid objects.