 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion Generative Flow Samplers: Improving learning signals through partial trajectory optimization
Paper and Code
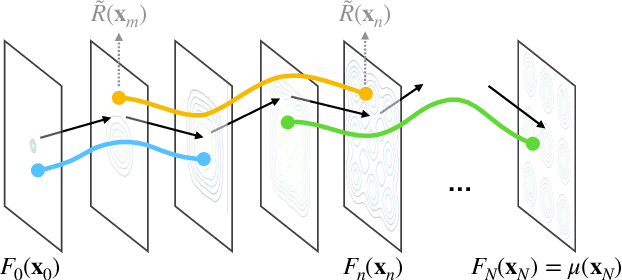
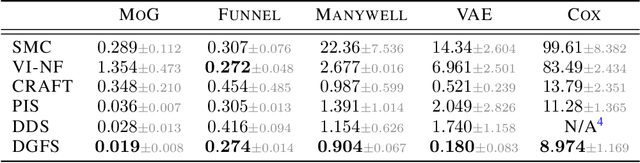

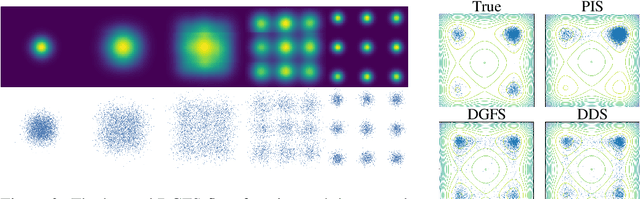
We tackle the problem of sampling from intractable high-dimensional density functions, a fundamental task that often appears in machine learning and statistics. We extend recent sampling-based approaches that leverage controlled stochastic processes to model approximate samples from these target densities. The main drawback of these approaches is that the training objective requires full trajectories to compute, resulting in sluggish credit assignment issues due to use of entire trajectories and a learning signal present only at the terminal time. In this work, we present Diffusion Generative Flow Samplers (DGFS), a sampling-based framework where the learning process can be tractably broken down into short partial trajectory segments, via parameterizing an additional "flow function". Our method takes inspiration from the theory developed for generative flow networks (GFlowNets), allowing us to make use of intermediate learning signals and benefit from off-policy exploration capabilities. Through a variety of challenging experiments, we demonstrate that DGFS results in more accurate estimates of the normalization constant than closely-related prior methods.