 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion-Based Failure Sampling for Cyber-Physical Systems
Paper and Code
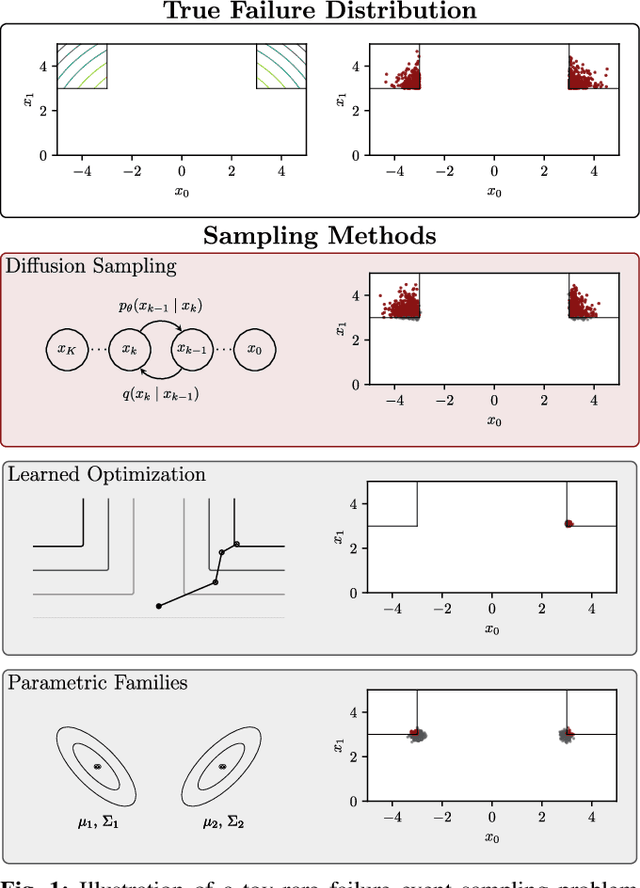
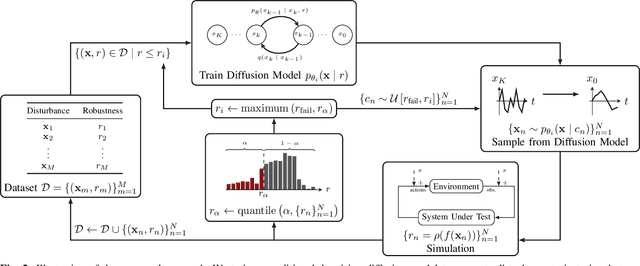
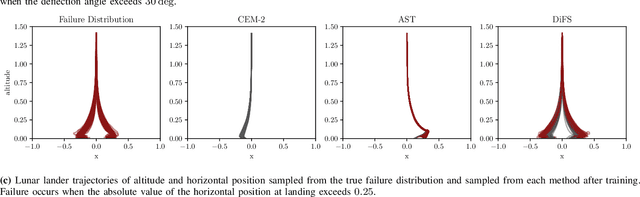
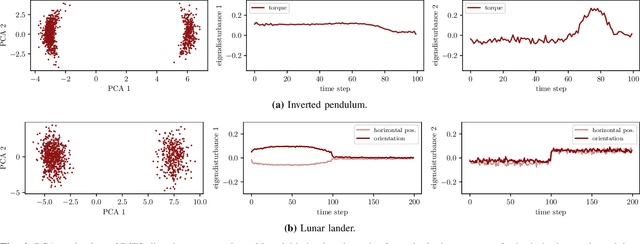
Validating safety-critical autonomous systems in high-dimensional domains such as robotics presents a significant challenge. Existing black-box approaches based on Markov chain Monte Carlo may require an enormous number of samples, while methods based on importance sampling often rely on simple parametric families that may struggle to represent the distribution over failures. We propose to sample the distribution over failures using a conditional denoising diffusion model, which has shown success in complex high-dimensional problems such as robotic task planning. We iteratively train a diffusion model to produce state trajectories closer to failure. We demonstrate the effectiveness of our approach on high-dimensional robotic validation tasks, improving sample efficiency and mode coverage compared to existing black-box techniques.