Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable and Learnable Robot Models
Paper and Code
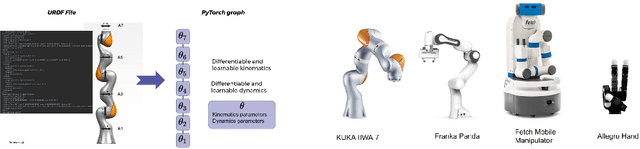
Building differentiable simulations of physical processes has recently received an increasing amount of attention. Specifically, some efforts develop differentiable robotic physics engines motivated by the computational benefits of merging rigid body simulations with modern differentiable machine learning libraries. Here, we present a library that focuses on the ability to combine data driven methods with analytical rigid body computations. More concretely, our library \emph{Differentiable Robot Models} implements both \emph{differentiable} and \emph{learnable} models of the kinematics and dynamics of robots in Pytorch. The source-code is available at \url{https://github.com/facebookresearch/differentiable-robot-model}
View paper on