 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDFBVS: Deep Feature-Based Visual Servo
Paper and Code
Jan 20, 2022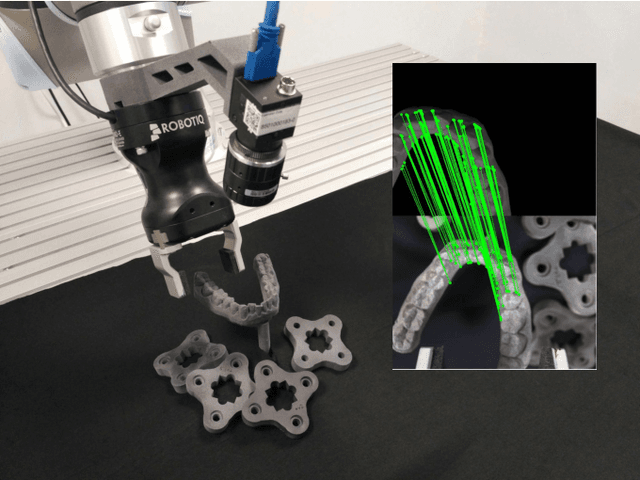
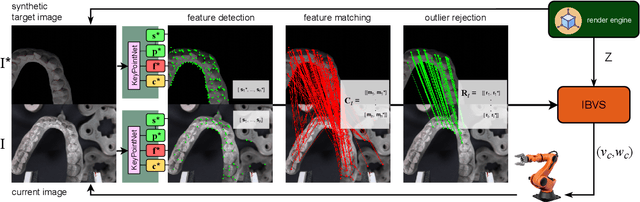
Classical Visual Servoing (VS) rely on handcrafted visual features, which limit their generalizability. Recently, a number of approaches, some based on Deep Neural Networks, have been proposed to overcome this limitation by comparing directly the entire target and current camera images. However, by getting rid of the visual features altogether, those approaches require the target and current images to be essentially similar, which precludes the generalization to unknown, cluttered, scenes. Here we propose to perform VS based on visual features as in classical VS approaches but, contrary to the latter, we leverage recent breakthroughs in Deep Learning to automatically extract and match the visual features. By doing so, our approach enjoys the advantages from both worlds: (i) because our approach is based on visual features, it is able to steer the robot towards the object of interest even in presence of significant distraction in the background; (ii) because the features are automatically extracted and matched, our approach can easily and automatically generalize to unseen objects and scenes. In addition, we propose to use a render engine to synthesize the target image, which offers a further level of generalization. We demonstrate these advantages in a robotic grasping task, where the robot is able to steer, with high accuracy, towards the object to grasp, based simply on an image of the object rendered from the camera view corresponding to the desired robot grasping pose.