 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDEVO: Depth-Event Camera Visual Odometry in Challenging Conditions
Paper and Code
Feb 05, 2022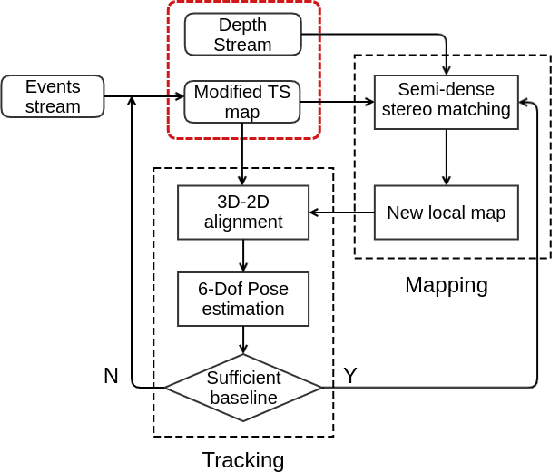

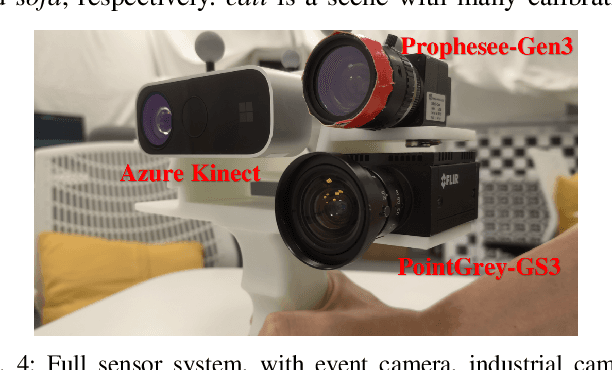

We present a novel real-time visual odometry framework for a stereo setup of a depth and high-resolution event camera. Our framework balances accuracy and robustness against computational efficiency towards strong performance in challenging scenarios. We extend conventional edge-based semi-dense visual odometry towards time-surface maps obtained from event streams. Semi-dense depth maps are generated by warping the corresponding depth values of the extrinsically calibrated depth camera. The tracking module updates the camera pose through efficient, geometric semi-dense 3D-2D edge alignment. Our approach is validated on both public and self-collected datasets captured under various conditions. We show that the proposed method performs comparable to state-of-the-art RGB-D camera-based alternatives in regular conditions, and eventually outperforms in challenging conditions such as high dynamics or low illumination.