Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of a Robotic System for Automated Decaking of 3D-Printed Parts
Paper and Code
Mar 11, 2020
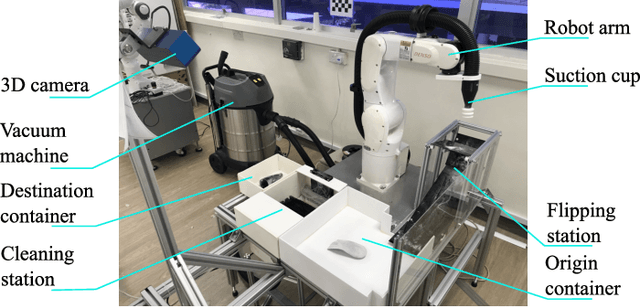
With the rapid rise of 3D-printing as a competitive mass manufacturing method, manual "decaking" - i.e. removing the residual powder that sticks to a 3D-printed part - has become a significant bottleneck. Here, we introduce, for the first time to our knowledge, a robotic system for automated decaking of 3D-printed parts. Combining Deep Learning for 3D perception, smart mechanical design, motion planning, and force control for industrial robots, we developed a system that can automatically decake parts in a fast and efficient way. Through a series of decaking experiments performed on parts printed by a Multi Jet Fusion printer, we demonstrated the feasibility of robotic decaking for 3D-printing-based mass manufacturing.
* 7 pages, ICRA 2020
View paper on