 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Dynamic Modeling and Control of a 2-DOF Robotic Wrist Actuated by Twisted and Coiled Actuators
Paper and Code
Mar 07, 2025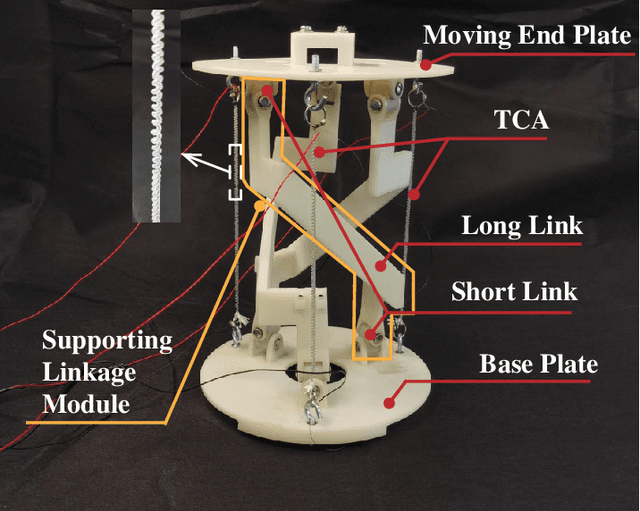
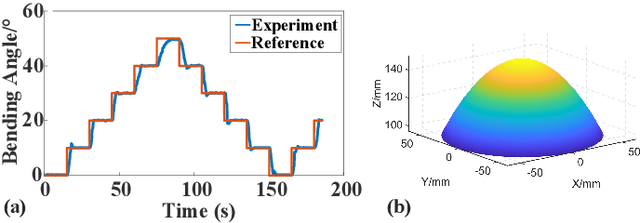
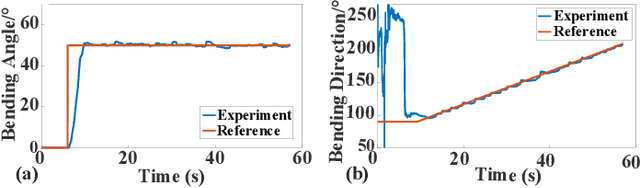
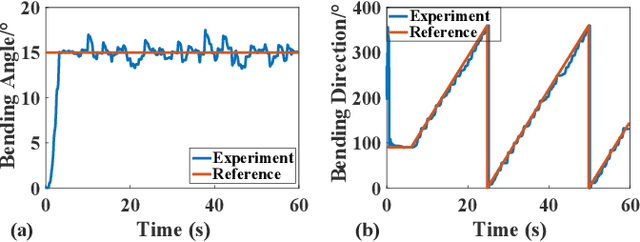
Robotic wrists play a pivotal role in the functionality of industrial manipulators and humanoid robots, facilitating manipulation and grasping tasks. In recent years, there has been a growing interest in integrating artificial muscle-driven actuators for robotic wrists, driven by advancements in technology offering high energy density, lightweight construction, and compact designs. However, in the study of robotic wrists driven by artificial muscles, dynamic model-based controllers are often overlooked, despite their critical importance for motion analysis and dynamic control of robots. This paper presents a novel design of a two-degree-of-freedom (2-DOF) robotic wrist driven by twisted and coiled actuators (TCA) utilizing a parallel mechanism with a 3RRRR configuration. The proposed robotic wrist is expected to feature lightweight structures and superior motion performance while mitigating friction issues. The Lagrangian dynamic model of the wrist is established, along with a nonlinear model predictive controller (NMPC) designed for trajectory tracking tasks. A prototype of the robotic wrist is developed, and extensive experiments are conducted to validate its superior motion performance and the proposed dynamic model. Subsequently, extensive comparative experiments between NMPC and PID controller were conducted under various operating conditions. The experimental results demonstrate the effectiveness and robustness of the dynamic model-based controller in the motion control of TCA-driven robotic wrists.