 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Experimental Evaluation of a Hierarchical Controller for an Autonomous Ground Vehicle with Large Uncertainties
Paper and Code
Aug 09, 2021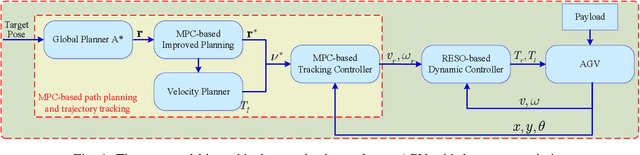
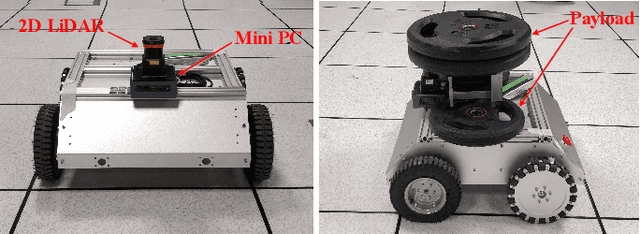


Autonomous ground vehicles (AGVs) are receiving increasing attention, and the motion planning and control problem for these vehicles has become a hot research topic. In real applications such as material handling, an AGV is subject to large uncertainties and its motion planning and control become challenging. In this paper, we investigate this problem by proposing a hierarchical control scheme, which is integrated by a model predictive control (MPC) based path planning and trajectory tracking control at the high level, and a reduced-order extended state observer (RESO) based dynamic control at the low level. The control at the high level consists of an MPC-based improved path planner, a velocity planner, and an MPC-based tracking controller. Both the path planning and trajectory tracking control problems are formulated under an MPC framework. The control at the low level employs the idea of active disturbance rejection control (ADRC). The uncertainties are estimated via a RESO and then compensated in the control in real-time. We show that, for the first-order uncertain AGV dynamic model, the RESO-based control only needs to know the control direction. Finally, simulations and experiments on an AGV with different payloads are conducted. The results illustrate that the proposed hierarchical control scheme achieves satisfactory motion planning and control performance with large uncertainties.