 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Evaluation of an Invariant Extended Kalman Filter for Trunk Motion Estimation with Sensor Misalignment
Paper and Code
May 16, 2022

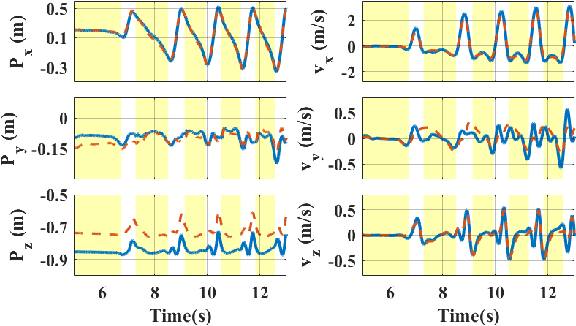
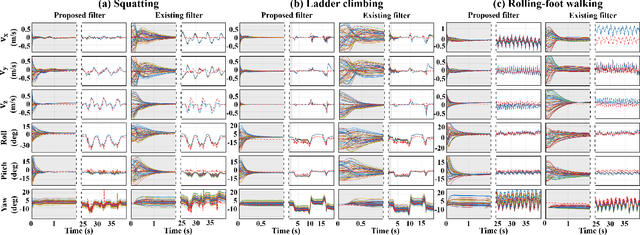
Understanding human motion is of critical importance for health monitoring and control of assistive robots, yet many human kinematic variables cannot be directly or accurately measured by wearable sensors. In recent years, invariant extended Kalman filtering (InEKF) has shown a great potential in nonlinear state estimation, but its applications to human poses new challenges, including imperfect placement of wearable sensors and inaccurate measurement models. To address these challenges, this paper proposes an augmented InEKF design which considers the misalignment of the inertial sensor at the trunk as part of the states and preserves the group affine property for the process model. Personalized lower-extremity forward kinematic models are built and employed as the measurement model for the augmented InEKF. Observability analysis for the new InEKF design is presented. The filter is evaluated with three subjects in squatting, rolling-foot walking, and ladder-climbing motions. Experimental results validate the superior performance of the proposed InEKF over the state-of-the-art InEKF. Improved accuracy and faster convergence in estimating the velocity and orientation of human, in all three motions, are achieved despite the significant initial estimation errors and the uncertainties associated with the forward kinematic measurement model.