 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Characterization of a 3D-printed Pneumatically-driven Bistable Valve with Tunable Characteristics
Paper and Code
Oct 04, 2021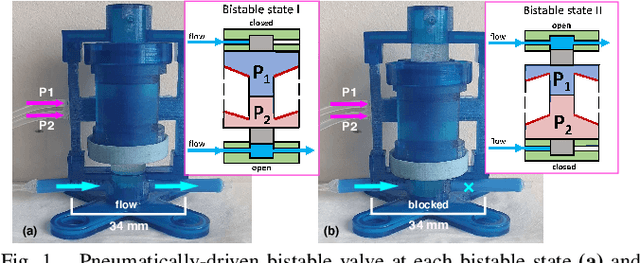



Although research studies in pneumatic soft robots develop rapidly, most pneumatic actuators are still controlled by rigid valves and conventional electronics. The existence of these rigid, electronic components sacrifices the compliance and adaptability of soft robots.} Current electronics-free valve designs based on soft materials are facing challenges in behaviour consistency, design flexibility, and fabrication complexity. Taking advantages of soft material 3D printing, this paper presents a new design of a bi-stable pneumatic valve, which utilises two soft, pneumatically-driven, and symmetrically-oriented conical shells with structural bistability to stabilise and regulate the airflow. The critical pressure required to operate the valve can be adjusted by changing the design features of the soft bi-stable structure. Multi-material printing simplifies the valve fabrication, enhances the flexibility in design feature optimisations, and improves the system repeatability. In this work, both a theoretical model and physical experiments are introduced to examine the relationships between the critical operating pressure and the key design features. Results with valve characteristic tuning via material stiffness changing show better effectiveness compared to the change of geometry design features (demonstrated largest tunable critical pressure range from 15.3 to 65.2 kPa and fastest response time $\leq$ 1.8 s.