 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Prediction Without the Sensors: Leveraging Structure for Unsupervised Learning from Monocular Videos
Paper and Code
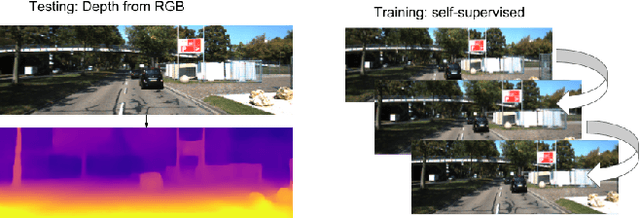
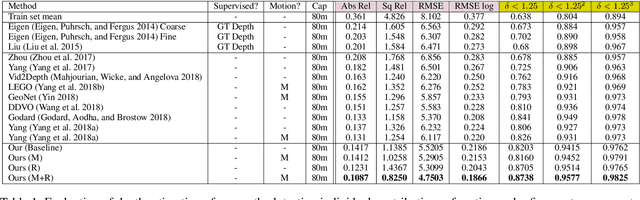
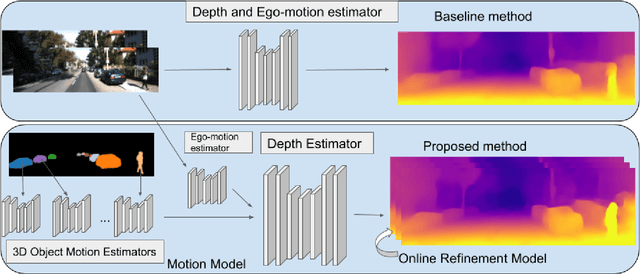

Learning to predict scene depth from RGB inputs is a challenging task both for indoor and outdoor robot navigation. In this work we address unsupervised learning of scene depth and robot ego-motion where supervision is provided by monocular videos, as cameras are the cheapest, least restrictive and most ubiquitous sensor for robotics. Previous work in unsupervised image-to-depth learning has established strong baselines in the domain. We propose a novel approach which produces higher quality results, is able to model moving objects and is shown to transfer across data domains, e.g. from outdoors to indoor scenes. The main idea is to introduce geometric structure in the learning process, by modeling the scene and the individual objects; camera ego-motion and object motions are learned from monocular videos as input. Furthermore an online refinement method is introduced to adapt learning on the fly to unknown domains. The proposed approach outperforms all state-of-the-art approaches, including those that handle motion e.g. through learned flow. Our results are comparable in quality to the ones which used stereo as supervision and significantly improve depth prediction on scenes and datasets which contain a lot of object motion. The approach is of practical relevance, as it allows transfer across environments, by transferring models trained on data collected for robot navigation in urban scenes to indoor navigation settings. The code associated with this paper can be found at https://sites.google.com/view/struct2depth.