Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth-Based Visual Servoing Using Low-Accurate Arm
Paper and Code
Dec 12, 2016

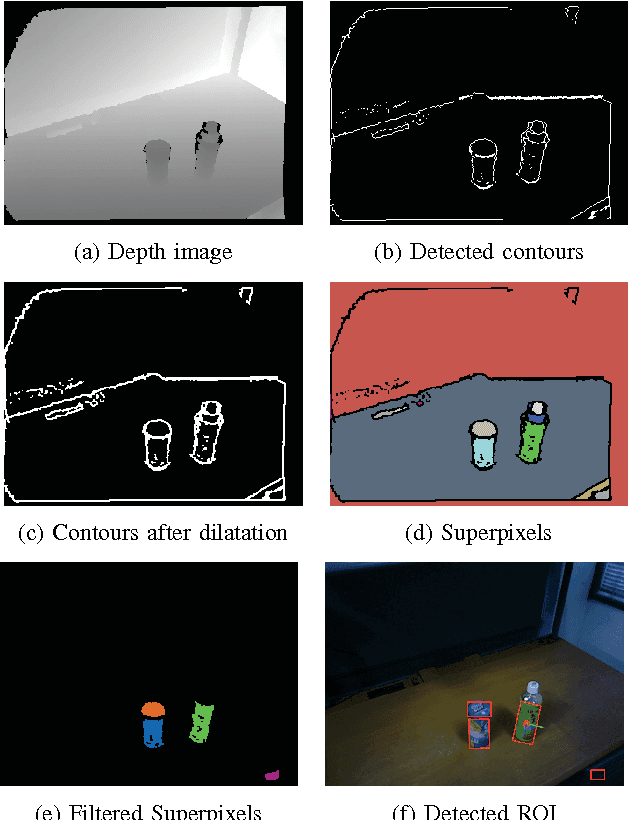

This paper proposes a visual-servoing method dedicated to grasping of daily-life objects. In order to obtain an affordable solution, we use a low-accurate robotic arm. Our method corrects errors by using an RGB-D sensor. It is based on SURF invariant features which allows us to perform object recognition at a high frame rate. We define regions of interest based on depth segmentation, and we use them to speed-up the recognition and to improve reliability. The system has been tested on a real-world scenario. In spite of the lack of accuracy of all the components and the uncontrolled environment, it grasps objects successfully on more than 95 percents of the trials.
* To appear in SCIS & ISIS 2016 proceedings
View paper on