 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeployment and Evaluation of a Flexible Human-Robot Collaboration Model Based on AND/OR Graphs in a Manufacturing Environment
Paper and Code
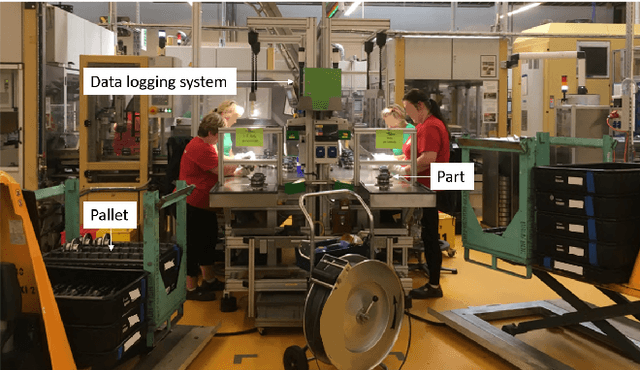
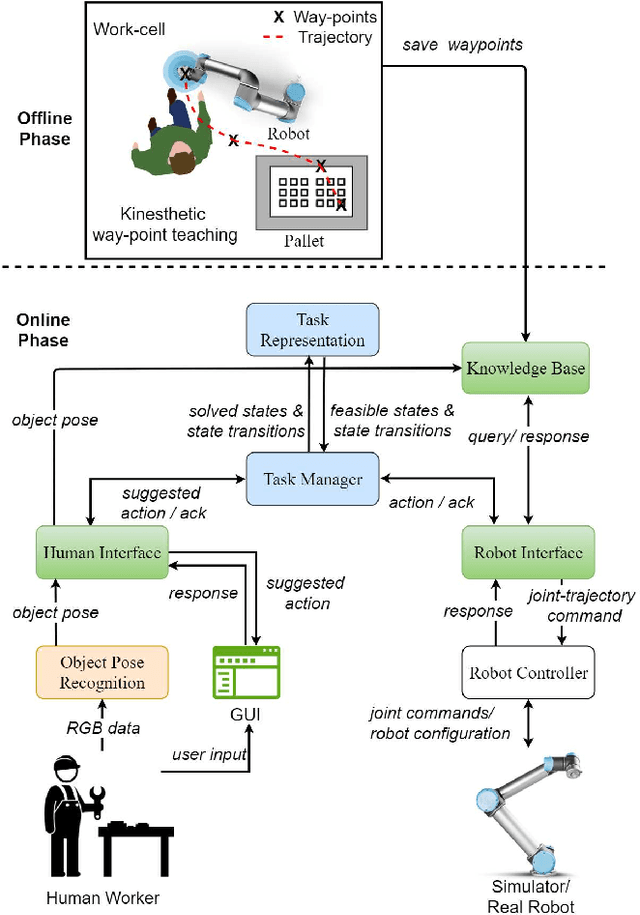

The Industry 4.0 paradigm promises shorter development times, increased ergonomy, higher flexibility, and resource efficiency in manufacturing environments. Collaborative robots are an important tangible technology for implementing such a paradigm. A major bottleneck to effectively deploy collaborative robots to manufacturing industries is developing task planning algorithms that enable them to recognize and naturally adapt to varying and even unpredictable human actions while simultaneously ensuring an overall efficiency in terms of production cycle time. In this context, an architecture encompassing task representation, task planning, sensing, and robot control has been designed, developed and evaluated in a real industrial environment. A pick-and-place palletization task, which requires the collaboration between humans and robots, is investigated. The architecture uses AND/OR graphs for representing and reasoning upon human-robot collaboration models online. Furthermore, objective measures of the overall computational performance and subjective measures of naturalness in human-robot collaboration have been evaluated by performing experiments with production-line operators. The results of this user study demonstrate how human-robot collaboration models like the one we propose can leverage the flexibility and the comfort of operators in the workplace. In this regard, an extensive comparison study among recent models has been carried out.