 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemystifying active inference
Paper and Code

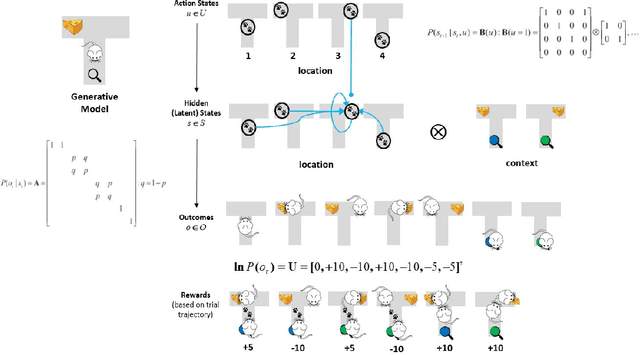
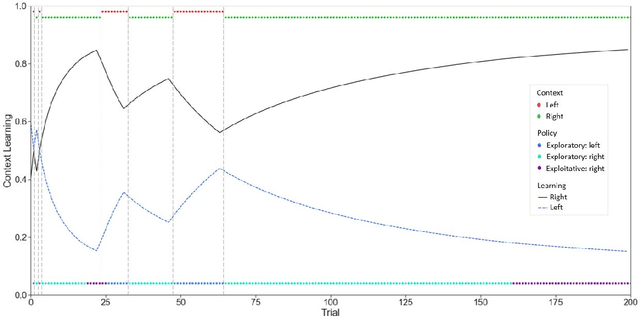
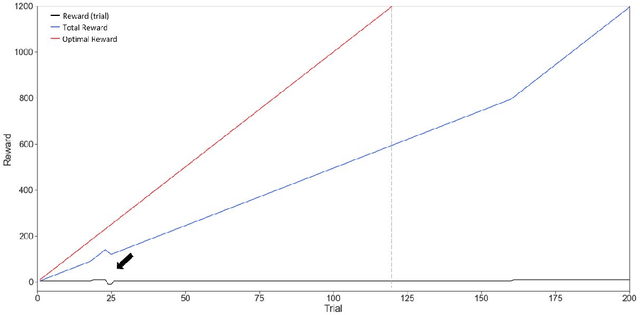
Active inference is a first (Bayesian) principles account of how autonomous agents might operate in dynamic, non-stationary environments. The optimization of congruent formulations of the free energy functional (variational and expected), in active inference, enables agents to make inferences about the environment and select optimal behaviors. The agent achieves this by evaluating (sensory) evidence in relation to its internal generative model that entails beliefs about future (hidden) states and sequence of actions that it can choose. In contrast to analogous frameworks $-$ by operating in a pure belief-based setting (free energy functional of beliefs about states) $-$ active inference agents can carry out epistemic exploration and naturally account for uncertainty about their environment. Through this review, we disambiguate these properties, by providing a condensed overview of the theory underpinning active inference. A T-maze simulation is used to demonstrate how these behaviors emerge naturally, as the agent makes inferences about the observed outcomes and optimizes its generative model (via belief updating). Additionally, the discrete state-space and time formulation presented provides an accessible guide on how to derive the (variational and expected) free energy equations and belief updating rules. We conclude by noting that this formalism can be applied in other engineering applications; e.g., robotic arm movement, playing Atari games, etc., if appropriate underlying probability distributions (i.e. generative model) can be formulated.