 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstration-Guided Deep Reinforcement Learning of Control Policies for Dexterous Human-Robot Interaction
Paper and Code
Jun 27, 2019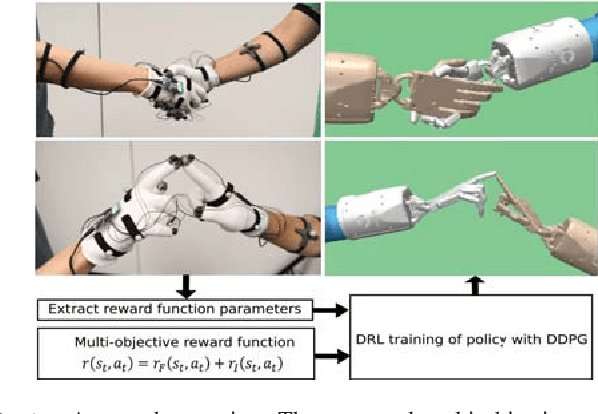
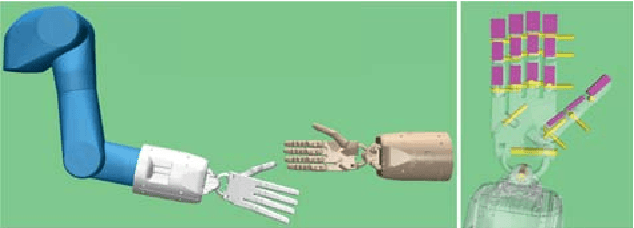
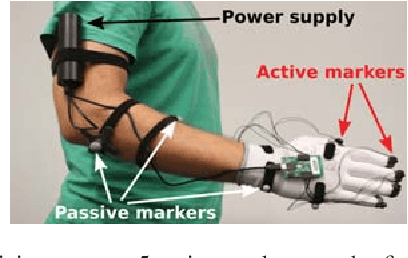
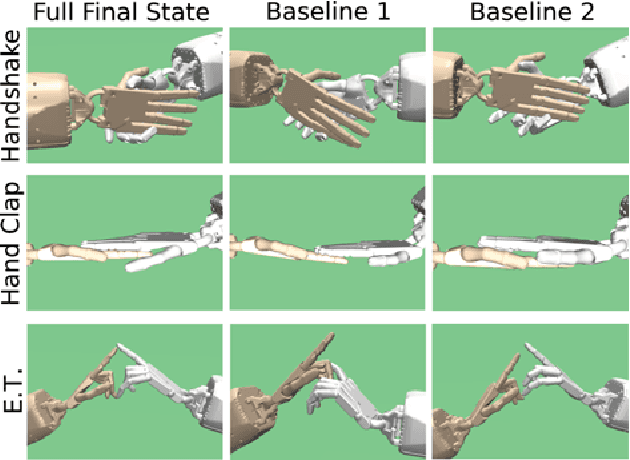
In this paper, we propose a method for training control policies for human-robot interactions such as handshakes or hand claps via Deep Reinforcement Learning. The policy controls a humanoid Shadow Dexterous Hand, attached to a robot arm. We propose a parameterizable multi-objective reward function that allows learning of a variety of interactions without changing the reward structure. The parameters of the reward function are estimated directly from motion capture data of human-human interactions in order to produce policies that are perceived as being natural and human-like by observers. We evaluate our method on three significantly different hand interactions: handshake, hand clap and finger touch. We provide detailed analysis of the proposed reward function and the resulting policies and conduct a large-scale user study, indicating that our policy produces natural looking motions.