 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeja vu: Scalable Place Recognition Using Mutually Supportive Feature Frequencies
Paper and Code
Jul 20, 2017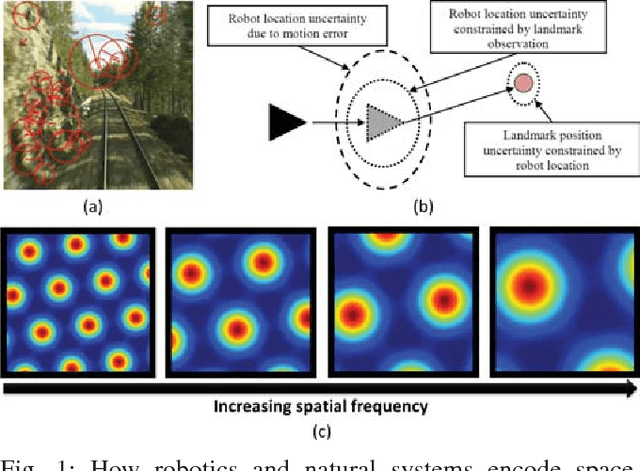
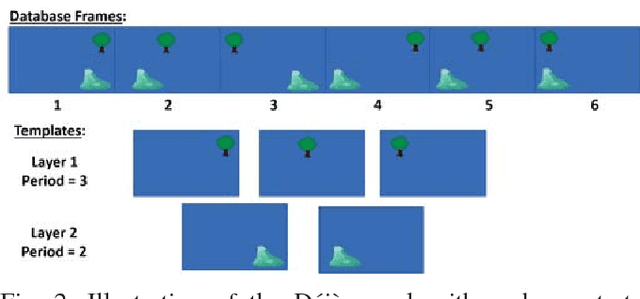
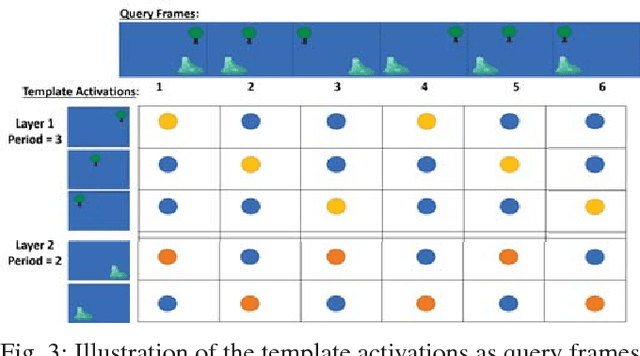
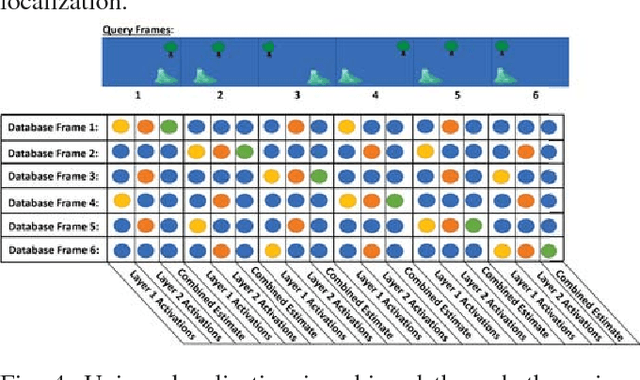
Learning and recognition is a fundamental process performed in many robot operations such as mapping and localization. The majority of approaches share some common characteristics, such as attempting to extract salient features, landmarks or signatures, and growth in data storage and computational requirements as the size of the environment increases. In biological systems, spatial encoding in the brain is definitively known to be performed using a fixed-size neural encoding framework - the place, head-direction and grid cells found in the mammalian hippocampus and entorhinal cortex. Particularly paradoxically, one of the main encoding centers - the grid cells - represents the world using a highly aliased, repetitive encoding structure where one neuron represents an unbounded number of places in the world. Inspired by this system, in this paper we invert the normal approach used in forming mapping and localization algorithms, by developing a novel place recognition algorithm that seeks out and leverages repetitive, mutually complementary landmark frequencies in the world. The combinatorial encoding capacity of multiple different frequencies enables not only the ability to achieve efficient data storage, but also the potential for sub-linear storage growth in a learning and recall system. Using both ground-based and aerial camera datasets, we demonstrate the system finding and utilizing these frequencies to achieve successful place recognition, and discuss how this approach might scale to arbitrarily large global datasets and dimensions.