 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDefending Observation Attacks in Deep Reinforcement Learning via Detection and Denoising
Paper and Code
Jun 14, 2022
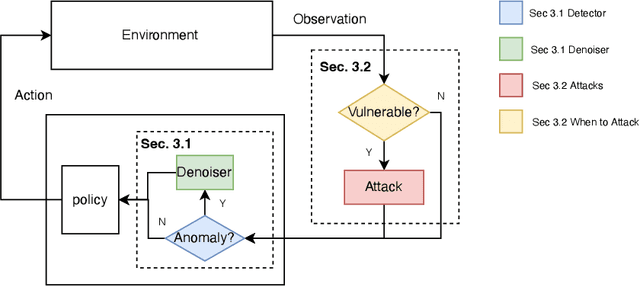
Neural network policies trained using Deep Reinforcement Learning (DRL) are well-known to be susceptible to adversarial attacks. In this paper, we consider attacks manifesting as perturbations in the observation space managed by the external environment. These attacks have been shown to downgrade policy performance significantly. We focus our attention on well-trained deterministic and stochastic neural network policies in the context of continuous control benchmarks subject to four well-studied observation space adversarial attacks. To defend against these attacks, we propose a novel defense strategy using a detect-and-denoise schema. Unlike previous adversarial training approaches that sample data in adversarial scenarios, our solution does not require sampling data in an environment under attack, thereby greatly reducing risk during training. Detailed experimental results show that our technique is comparable with state-of-the-art adversarial training approaches.