 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepFusion: Real-Time Dense 3D Reconstruction for Monocular SLAM using Single-View Depth and Gradient Predictions
Paper and Code
Jul 25, 2022

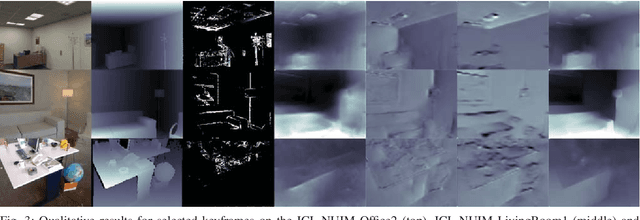
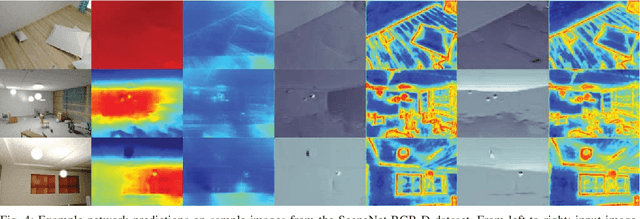
While the keypoint-based maps created by sparse monocular simultaneous localisation and mapping (SLAM) systems are useful for camera tracking, dense 3D reconstructions may be desired for many robotic tasks. Solutions involving depth cameras are limited in range and to indoor spaces, and dense reconstruction systems based on minimising the photometric error between frames are typically poorly constrained and suffer from scale ambiguity. To address these issues, we propose a 3D reconstruction system that leverages the output of a convolutional neural network (CNN) to produce fully dense depth maps for keyframes that include metric scale. Our system, DeepFusion, is capable of producing real-time dense reconstructions on a GPU. It fuses the output of a semi-dense multiview stereo algorithm with the depth and gradient predictions of a CNN in a probabilistic fashion, using learned uncertainties produced by the network. While the network only needs to be run once per keyframe, we are able to optimise for the depth map with each new frame so as to constantly make use of new geometric constraints. Based on its performance on synthetic and real-world datasets, we demonstrate that DeepFusion is capable of performing at least as well as other comparable systems.