 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepArUco++: Improved detection of square fiducial markers in challenging lighting conditions
Paper and Code
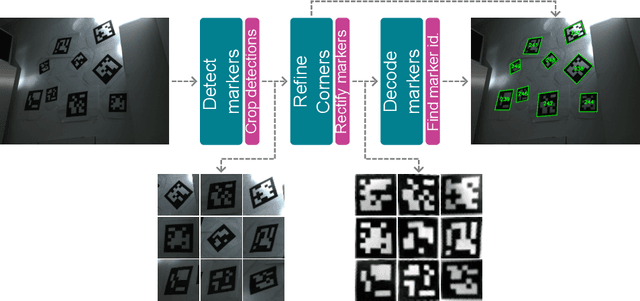
Fiducial markers are a computer vision tool used for object pose estimation and detection. These markers are highly useful in fields such as industry, medicine and logistics. However, optimal lighting conditions are not always available,and other factors such as blur or sensor noise can affect image quality. Classical computer vision techniques that precisely locate and decode fiducial markers often fail under difficult illumination conditions (e.g. extreme variations of lighting within the same frame). Hence, we propose DeepArUco++, a deep learning-based framework that leverages the robustness of Convolutional Neural Networks to perform marker detection and decoding in challenging lighting conditions. The framework is based on a pipeline using different Neural Network models at each step, namely marker detection, corner refinement and marker decoding. Additionally, we propose a simple method for generating synthetic data for training the different models that compose the proposed pipeline, and we present a second, real-life dataset of ArUco markers in challenging lighting conditions used to evaluate our system. The developed method outperforms other state-of-the-art methods in such tasks and remains competitive even when testing on the datasets used to develop those methods. Code available in GitHub: https://github.com/AVAuco/deeparuco/