 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning with Feedback-based Exploration
Paper and Code
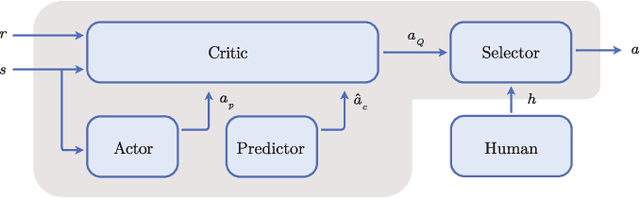
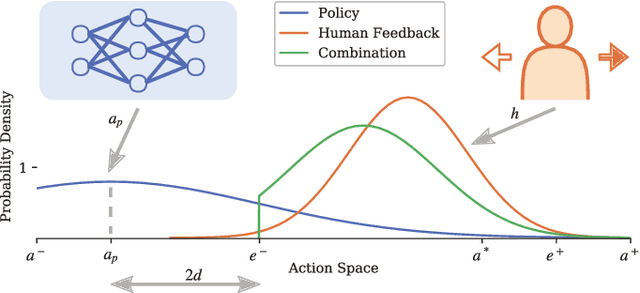

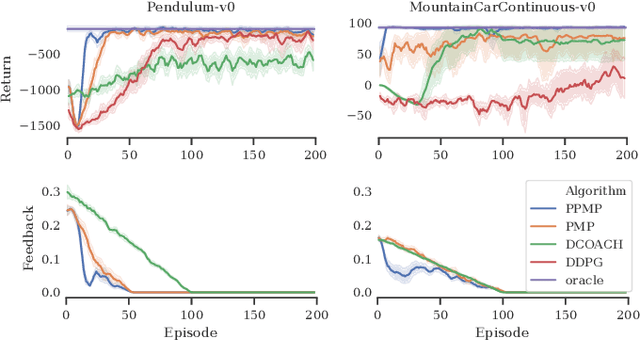
Deep Reinforcement Learning has enabled the control of increasingly complex and high-dimensional problems. However, the need of vast amounts of data before reasonable performance is attained prevents its widespread application. We employ binary corrective feedback as a general and intuitive manner to incorporate human intuition and domain knowledge in model-free machine learning. The uncertainty in the policy and the corrective feedback is combined directly in the action space as probabilistic conditional exploration. As a result, the greatest part of the otherwise ignorant learning process can be avoided. We demonstrate the proposed method, Predictive Probabilistic Merging of Policies (PPMP), in combination with DDPG. In experiments on continuous control problems of the OpenAI Gym, we achieve drastic improvements in sample efficiency, final performance, and robustness to erroneous feedback, both for human and synthetic feedback. Additionally, we show solutions beyond the demonstrated knowledge.