 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Time Optimal Velocity Control using Prior Knowledge
Paper and Code
Mar 12, 2019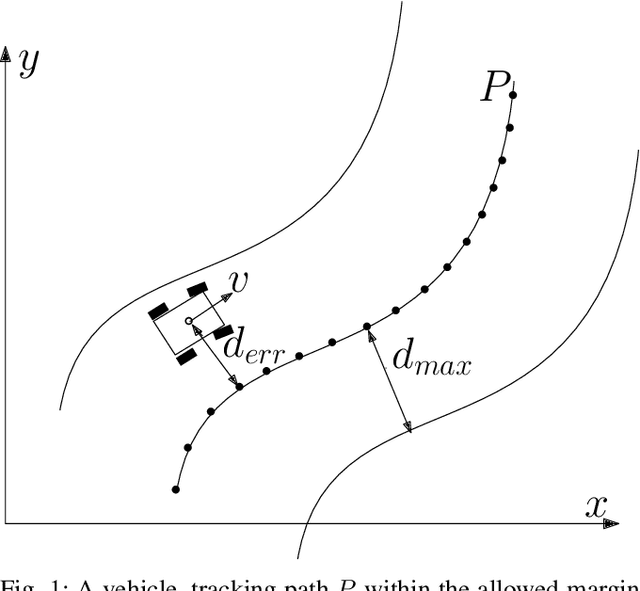
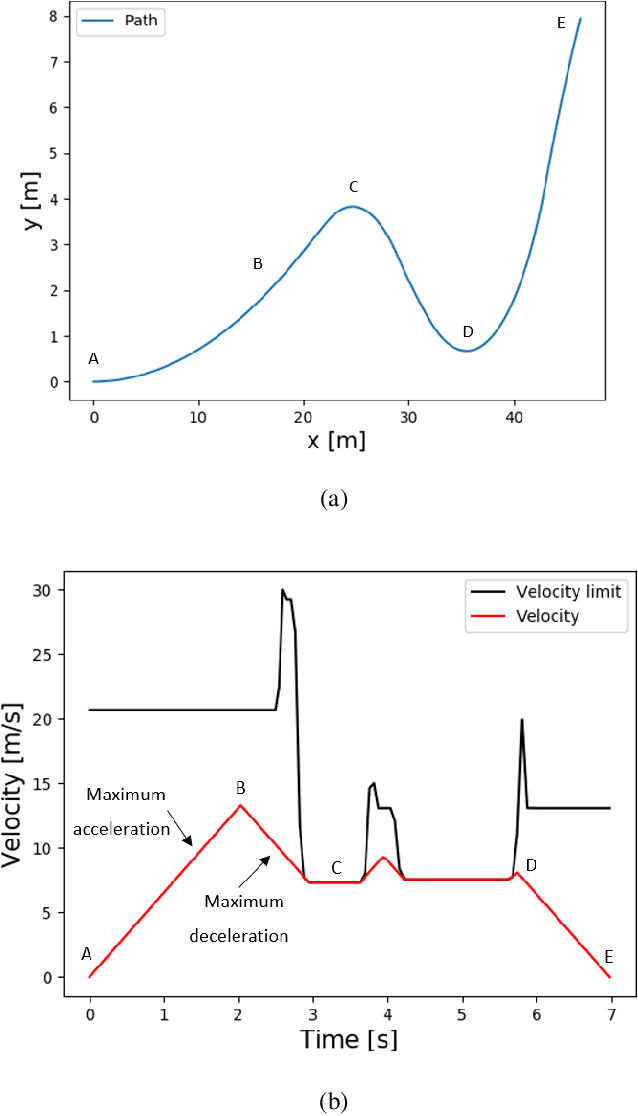
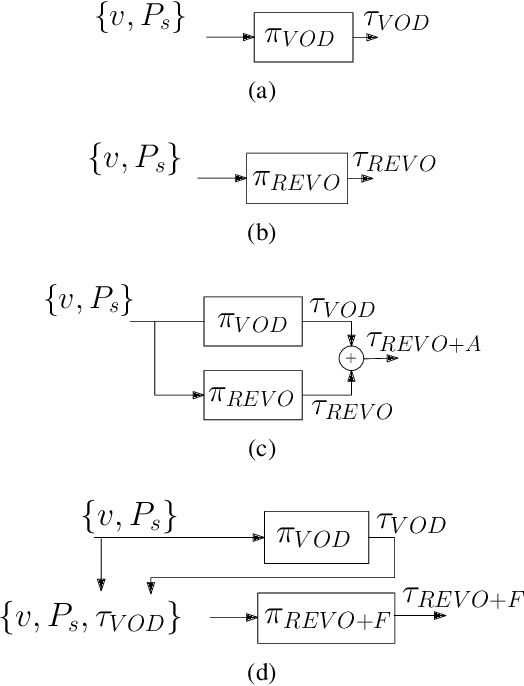
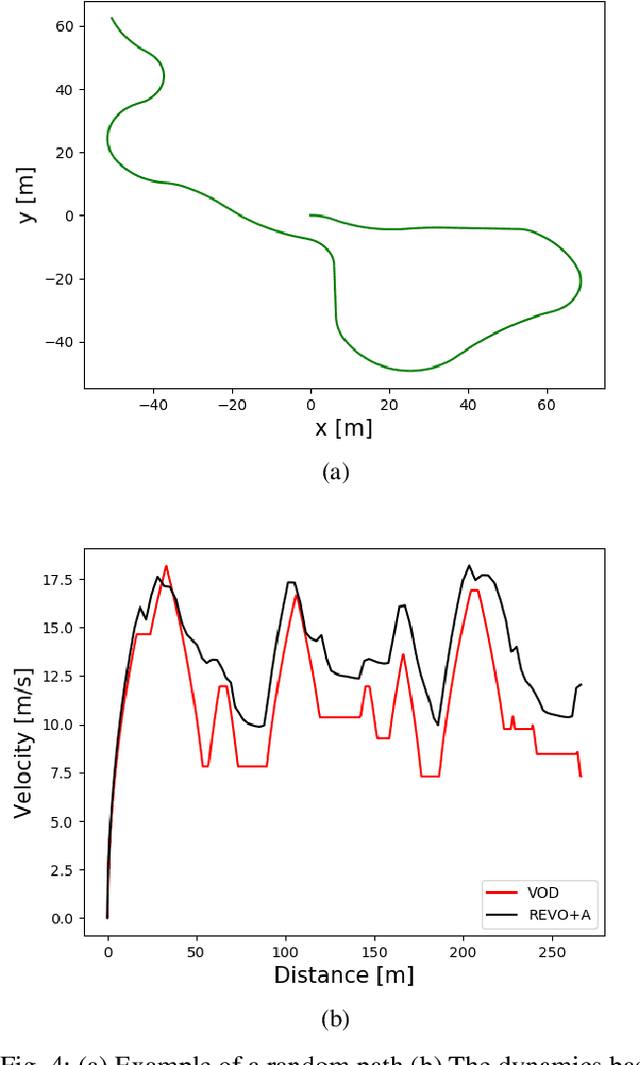
While autonomous navigation has recently gained great interest in the field of reinforcement learning, only a few works in this field have focused on the time optimal velocity control problem, i.e. controlling a vehicle such that it travels at the maximal speed without becoming dynamically unstable. Achieving maximal speed is important in many situations, such as emergency vehicles traveling at high speeds to their destinations, and regular vehicles executing emergency maneuvers to avoid imminent collisions. Time optimal velocity control can be solved numerically using existing methods that are based on optimal control and vehicle dynamics. In this paper, we use deep reinforcement learning to generate the time optimal velocity control. Furthermore, we use the numerical solution to further improve the performance of the reinforcement learner. It is shown that the reinforcement learner outperforms the numerically derived solution, and that the hybrid approach (combining learning with the numerical solution) speeds up the learning process.