Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for High Precision Assembly Tasks
Paper and Code
Sep 22, 2017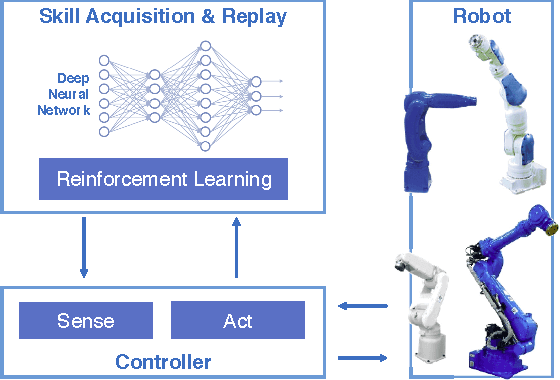

High precision assembly of mechanical parts requires accuracy exceeding the robot precision. Conventional part mating methods used in the current manufacturing requires tedious tuning of numerous parameters before deployment. We show how the robot can successfully perform a tight clearance peg-in-hole task through training a recurrent neural network with reinforcement learning. In addition to saving the manual effort, the proposed technique also shows robustness against position and angle errors for the peg-in-hole task. The neural network learns to take the optimal action by observing the robot sensors to estimate the system state. The advantages of our proposed method is validated experimentally on a 7-axis articulated robot arm.
* Conference: Accepted to IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), Vancouver, Canada, September 24-28,
2017. Video: https://youtu.be/b2pC78rBGH4
View paper on