Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Patch Visual Odometry
Paper and Code
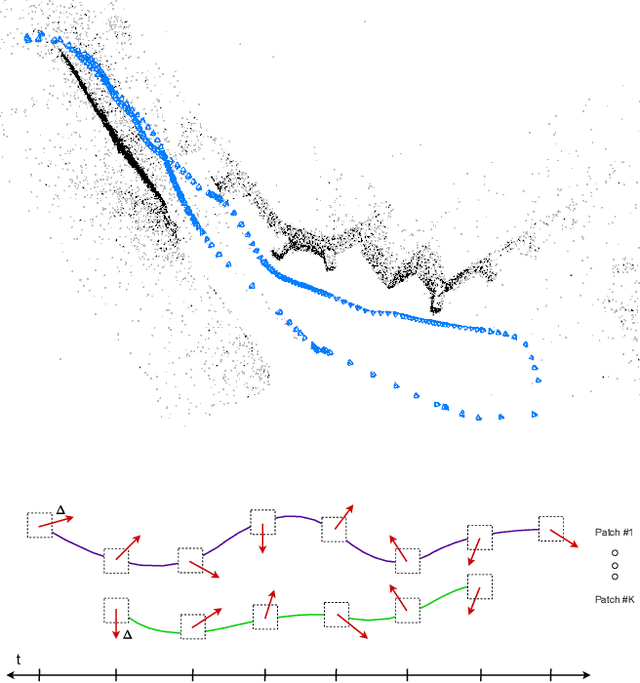
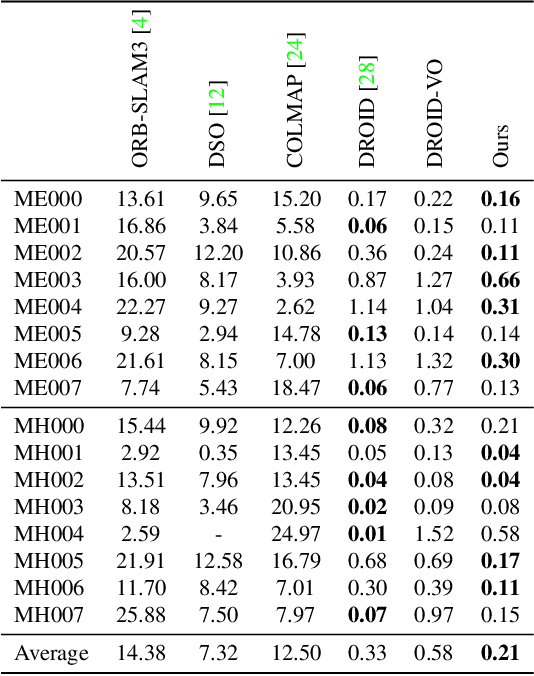
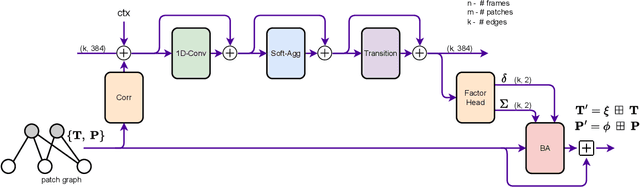
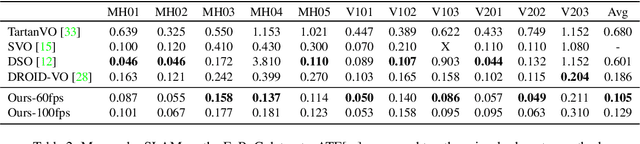
We propose Deep Patch Visual Odometry (DPVO), a new deep learning system for monocular Visual Odometry (VO). DPVO is accurate and robust while running at 2x-5x real-time speeds on a single RTX-3090 GPU using only 4GB of memory. We perform evaluation on standard benchmarks and outperform all prior work (classical or learned) in both accuracy and speed. Code is available at https://github.com/princeton-vl/DPVO.
View paper on
 OpenReview
OpenReview