 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Monocular 3D Human Pose Estimation via Cascaded Dimension-Lifting
Paper and Code
Apr 08, 2021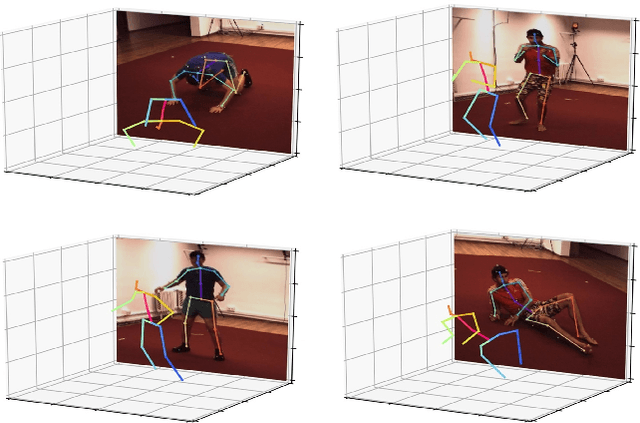
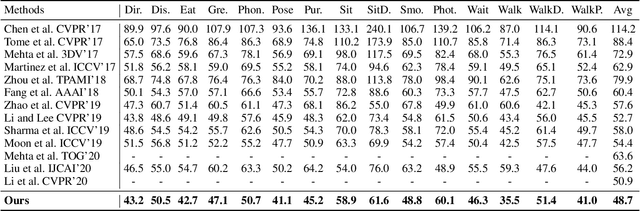


The 3D pose estimation from a single image is a challenging problem due to depth ambiguity. One type of the previous methods lifts 2D joints, obtained by resorting to external 2D pose detectors, to the 3D space. However, this type of approaches discards the contextual information of images which are strong cues for 3D pose estimation. Meanwhile, some other methods predict the joints directly from monocular images but adopt a 2.5D output representation $P^{2.5D} = (u,v,z^{r}) $ where both $u$ and $v$ are in the image space but $z^{r}$ in root-relative 3D space. Thus, the ground-truth information (e.g., the depth of root joint from the camera) is normally utilized to transform the 2.5D output to the 3D space, which limits the applicability in practice. In this work, we propose a novel end-to-end framework that not only exploits the contextual information but also produces the output directly in the 3D space via cascaded dimension-lifting. Specifically, we decompose the task of lifting pose from 2D image space to 3D spatial space into several sequential sub-tasks, 1) kinematic skeletons \& individual joints estimation in 2D space, 2) root-relative depth estimation, and 3) lifting to the 3D space, each of which employs direct supervisions and contextual image features to guide the learning process. Extensive experiments show that the proposed framework achieves state-of-the-art performance on two widely used 3D human pose datasets (Human3.6M, MuPoTS-3D).