 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep MAGSAC++
Paper and Code
Nov 28, 2021


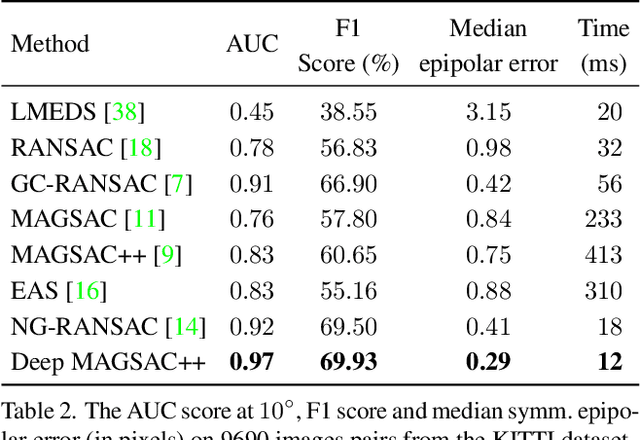
We propose Deep MAGSAC++ combining the advantages of traditional and deep robust estimators. We introduce a novel loss function that exploits the orientation and scale from partially affine covariant features, e.g., SIFT, in a geometrically justifiable manner. The new loss helps in learning higher-order information about the underlying scene geometry. Moreover, we propose a new sampler for RANSAC that always selects the sample with the highest probability of consisting only of inliers. After every unsuccessful iteration, the probabilities are updated in a principled way via a Bayesian approach. The prediction of the deep network is exploited as prior inside the sampler. Benefiting from the new loss, the proposed sampler, and a number of technical advancements, Deep MAGSAC++ is superior to the state-of-the-art both in terms of accuracy and run-time on thousands of image pairs from publicly available datasets for essential and fundamental matrix estimation.