 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning on a Data Diet: Finding Important Examples Early in Training
Paper and Code



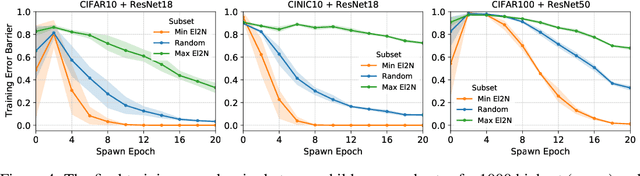
The recent success of deep learning has partially been driven by training increasingly overparametrized networks on ever larger datasets. It is therefore natural to ask: how much of the data is superfluous, which examples are important for generalization, and how do we find them? In this work, we make the striking observation that, on standard vision benchmarks, the initial loss gradient norm of individual training examples, averaged over several weight initializations, can be used to identify a smaller set of training data that is important for generalization. Furthermore, after only a few epochs of training, the information in gradient norms is reflected in the normed error--L2 distance between the predicted probabilities and one hot labels--which can be used to prune a significant fraction of the dataset without sacrificing test accuracy. Based on this, we propose data pruning methods which use only local information early in training, and connect them to recent work that prunes data by discarding examples that are rarely forgotten over the course of training. Our methods also shed light on how the underlying data distribution shapes the training dynamics: they rank examples based on their importance for generalization, detect noisy examples and identify subspaces of the model's data representation that are relatively stable over training.