Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning for Vanishing Point Detection Using an Inverse Gnomonic Projection
Paper and Code
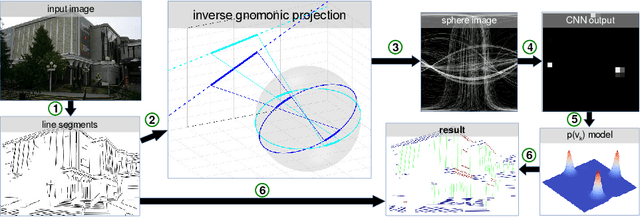


We present a novel approach for vanishing point detection from uncalibrated monocular images. In contrast to state-of-the-art, we make no a priori assumptions about the observed scene. Our method is based on a convolutional neural network (CNN) which does not use natural images, but a Gaussian sphere representation arising from an inverse gnomonic projection of lines detected in an image. This allows us to rely on synthetic data for training, eliminating the need for labelled images. Our method achieves competitive performance on three horizon estimation benchmark datasets. We further highlight some additional use cases for which our vanishing point detection algorithm can be used.
* Accepted for publication at German Conference on Pattern Recognition
(GCPR) 2017. This research was supported by German Research Foundation DFG
within Priority Research Programme 1894 "Volunteered Geographic Information:
Interpretation, Visualisation and Social Computing"
View paper on