 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning based Wearable Assistive System for Visually Impaired People
Paper and Code
Aug 09, 2019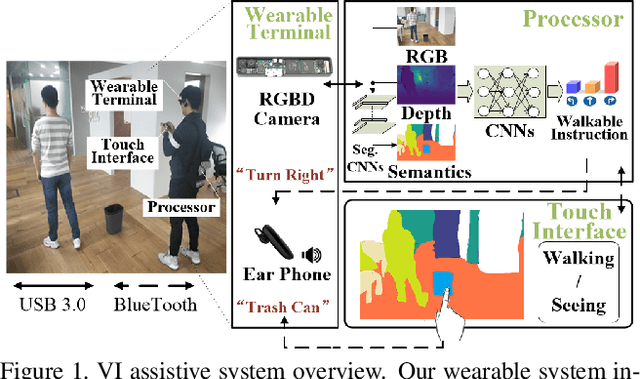
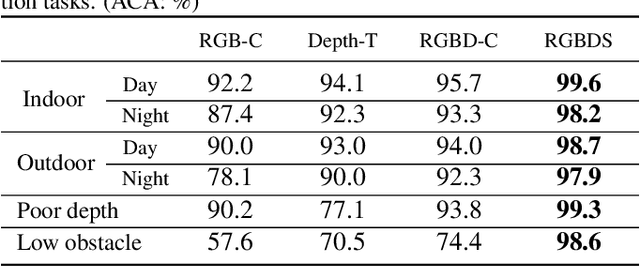
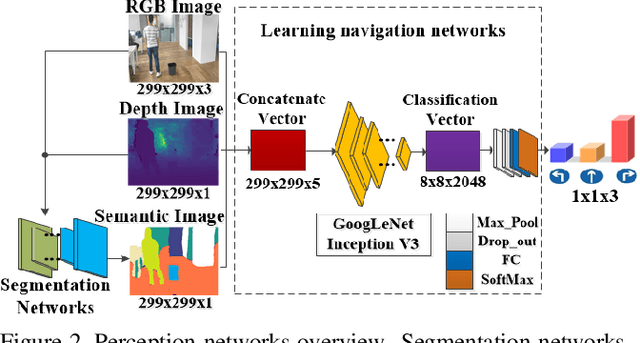
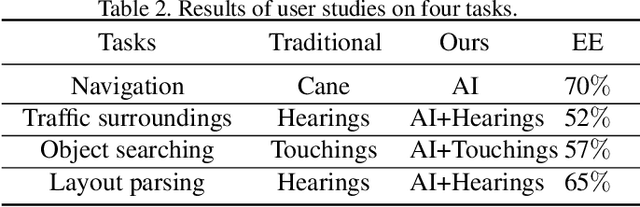
In this paper, we propose a deep learning based assistive system to improve the environment perception experience of visually impaired (VI). The system is composed of a wearable terminal equipped with an RGBD camera and an earphone, a powerful processor mainly for deep learning inferences and a smart phone for touch-based interaction. A data-driven learning approach is proposed to predict safe and reliable walkable instructions using RGBD data and the established semantic map. This map is also used to help VI understand their 3D surrounding objects and layout through well-designed touchscreen interactions. The quantitative and qualitative experimental results show that our learning based obstacle avoidance approach achieves excellent results in both indoor and outdoor datasets with low-lying obstacles. Meanwhile, user studies have also been carried out in various scenarios and showed the improvement of VI's environment perception experience with our system.