 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Lagrangian Networks for end-to-end learning of energy-based control for under-actuated systems
Paper and Code
Aug 03, 2019
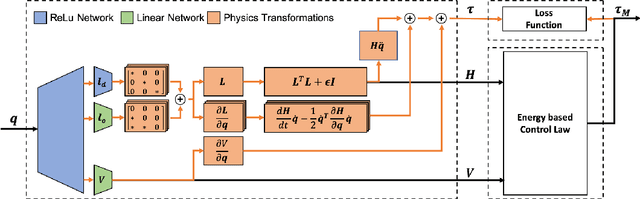

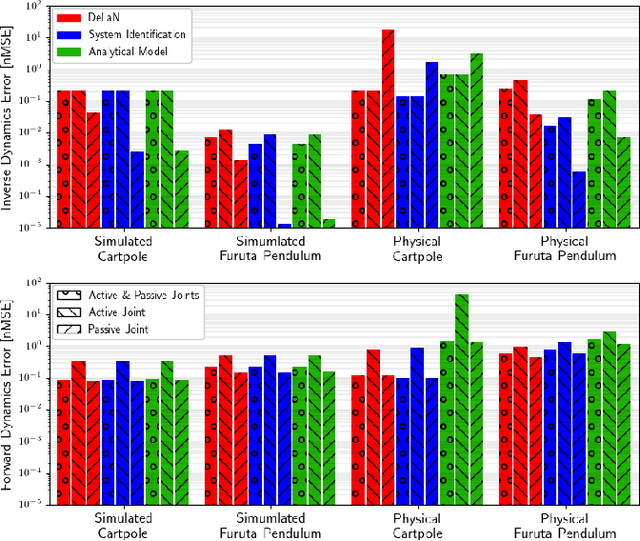
Applying Deep Learning to control has a lot of potential for enabling the intelligent design of robot control laws. Unfortunately common deep learning approaches to control, such as deep reinforcement learning, require an unrealistic amount of interaction with the real system, do not yield any performance guarantees, and do not make good use of extensive insights from model-based control. In particular, common black-box approaches -- that abandon all insight from control -- are not suitable for complex robot systems. We propose a deep control approach as a bridge between the solid theoretical foundations of energy-based control and the flexibility of deep learning. To accomplish this goal, we extend Deep Lagrangian Networks (DeLaN) to not only adhere to Lagrangian Mechanics but also ensure conservation of energy and passivity of the learned representation. This novel extension is embedded within generic model-based control laws to enable energy control of under-actuated systems. The resulting DeLaN for energy control (DeLaN 4EC) is the first model learning approach using generic function approximation that is capable of learning energy control. DeLaN 4EC exhibits excellent real-time control on the physical Furuta Pendulum and learns to swing-up the pendulum while the control law using system identification does not.