 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Kernel Learning of Dynamical Models from High-Dimensional Noisy Data
Paper and Code
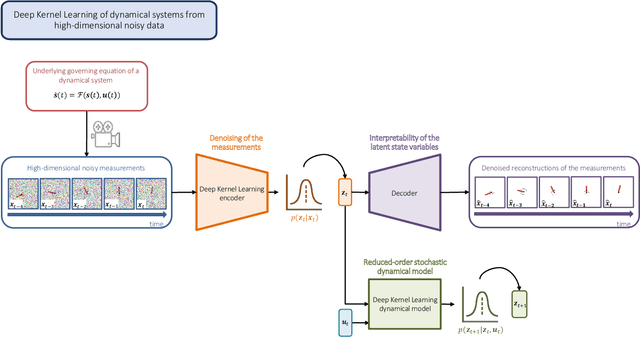
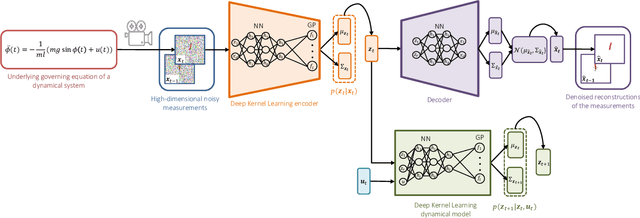

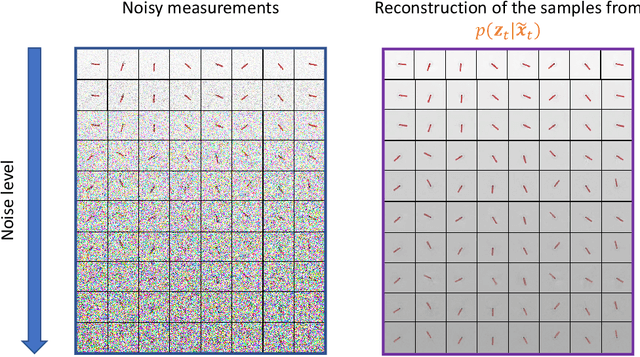
This work proposes a Stochastic Variational Deep Kernel Learning method for the data-driven discovery of low-dimensional dynamical models from high-dimensional noisy data. The framework is composed of an encoder that compresses high-dimensional measurements into low-dimensional state variables, and a latent dynamical model for the state variables that predicts the system evolution over time. The training of the proposed model is carried out in an unsupervised manner, i.e., not relying on labeled data. Our learning method is evaluated on the motion of a pendulum -- a well studied baseline for nonlinear model identification and control with continuous states and control inputs -- measured via high-dimensional noisy RGB images. Results show that the method can effectively denoise measurements, learn compact state representations and latent dynamical models, as well as identify and quantify modeling uncertainties.