 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Generative Models in Robotics: A Survey on Learning from Multimodal Demonstrations
Paper and Code
Aug 08, 2024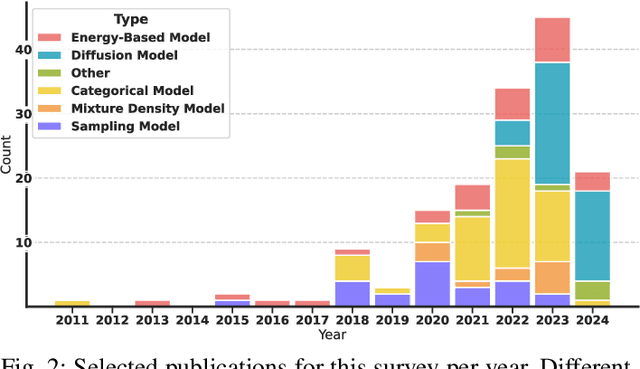


Learning from Demonstrations, the field that proposes to learn robot behavior models from data, is gaining popularity with the emergence of deep generative models. Although the problem has been studied for years under names such as Imitation Learning, Behavioral Cloning, or Inverse Reinforcement Learning, classical methods have relied on models that don't capture complex data distributions well or don't scale well to large numbers of demonstrations. In recent years, the robot learning community has shown increasing interest in using deep generative models to capture the complexity of large datasets. In this survey, we aim to provide a unified and comprehensive review of the last year's progress in the use of deep generative models in robotics. We present the different types of models that the community has explored, such as energy-based models, diffusion models, action value maps, or generative adversarial networks. We also present the different types of applications in which deep generative models have been used, from grasp generation to trajectory generation or cost learning. One of the most important elements of generative models is the generalization out of distributions. In our survey, we review the different decisions the community has made to improve the generalization of the learned models. Finally, we highlight the research challenges and propose a number of future directions for learning deep generative models in robotics.