 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep-3DAligner: Unsupervised 3D Point Set Registration Network With Optimizable Latent Vector
Paper and Code
Sep 29, 2020
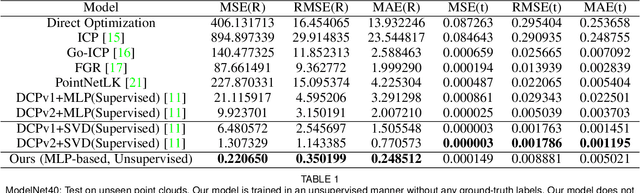
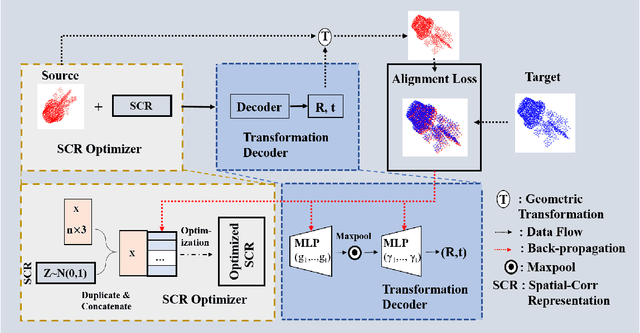
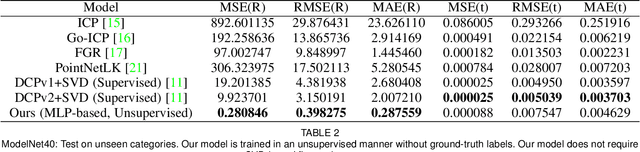
Point cloud registration is the process of aligning a pair of point sets via searching for a geometric transformation. Unlike classical optimization-based methods, recent learning-based methods leverage the power of deep learning for registering a pair of point sets. In this paper, we propose to develop a novel model that organically integrates the optimization to learning, aiming to address the technical challenges in 3D registration. More specifically, in addition to the deep transformation decoding network, our framework introduce an optimizable deep \underline{S}patial \underline{C}orrelation \underline{R}epresentation (SCR) feature. The SCR feature and weights of the transformation decoder network are jointly updated towards the minimization of an unsupervised alignment loss. We further propose an adaptive Chamfer loss for aligning partial shapes. To verify the performance of our proposed method, we conducted extensive experiments on the ModelNet40 dataset. The results demonstrate that our method achieves significantly better performance than the previous state-of-the-art approaches in the full/partial point set registration task.