Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecoding CNN based Object Classifier Using Visualization
Paper and Code
Jul 15, 2020
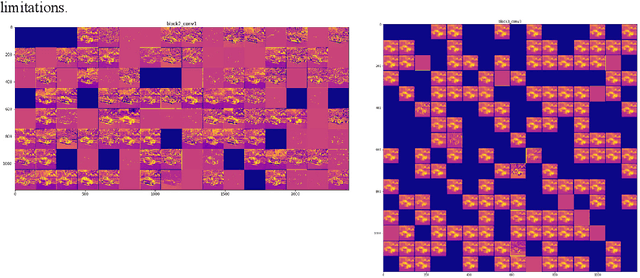

This paper investigates how working of Convolutional Neural Network (CNN) can be explained through visualization in the context of machine perception of autonomous vehicles. We visualize what type of features are extracted in different convolution layers of CNN that helps to understand how CNN gradually increases spatial information in every layer. Thus, it concentrates on region of interests in every transformation. Visualizing heat map of activation helps us to understand how CNN classifies and localizes different objects in image. This study also helps us to reason behind low accuracy of a model helps to increase trust on object detection module.
* Accepted at ACM International conference on Automotive User Interface
2020
View paper on