 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision Transformer under Random Frame Dropping
Paper and Code
Mar 03, 2023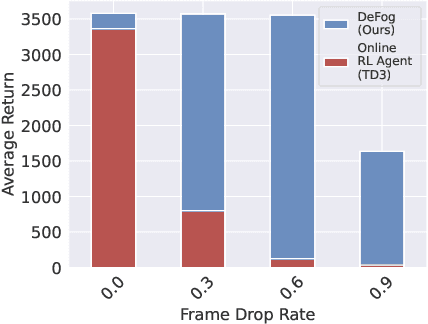
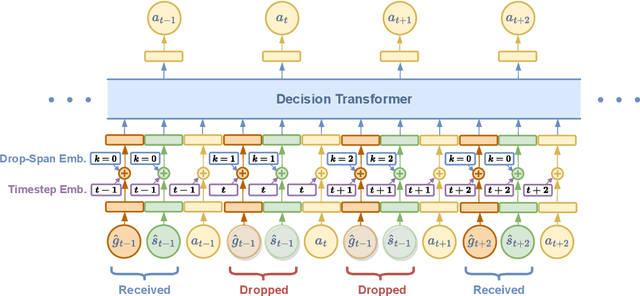
Controlling agents remotely with deep reinforcement learning~(DRL) in the real world is yet to come. One crucial stepping stone is to devise RL algorithms that are robust in the face of dropped information from corrupted communication or malfunctioning sensors. Typical RL methods usually require considerable online interaction data that are costly and unsafe to collect in the real world. Furthermore, when applying to the frame dropping scenarios, they perform unsatisfactorily even with moderate drop rates. To address these issues, we propose Decision Transformer under Random Frame Dropping~(DeFog), an offline RL algorithm that enables agents to act robustly in frame dropping scenarios without online interaction. DeFog first randomly masks out data in the offline datasets and explicitly adds the time span of frame dropping as inputs. After that, a finetuning stage on the same offline dataset with a higher mask rate would further boost the performance. Empirical results show that DeFog outperforms strong baselines under severe frame drop rates like 90\%, while maintaining similar returns under non-frame-dropping conditions in the regular MuJoCo control benchmarks and the Atari environments. Our approach offers a robust and deployable solution for controlling agents in real-world environments with limited or unreliable data.